正在加载图片...
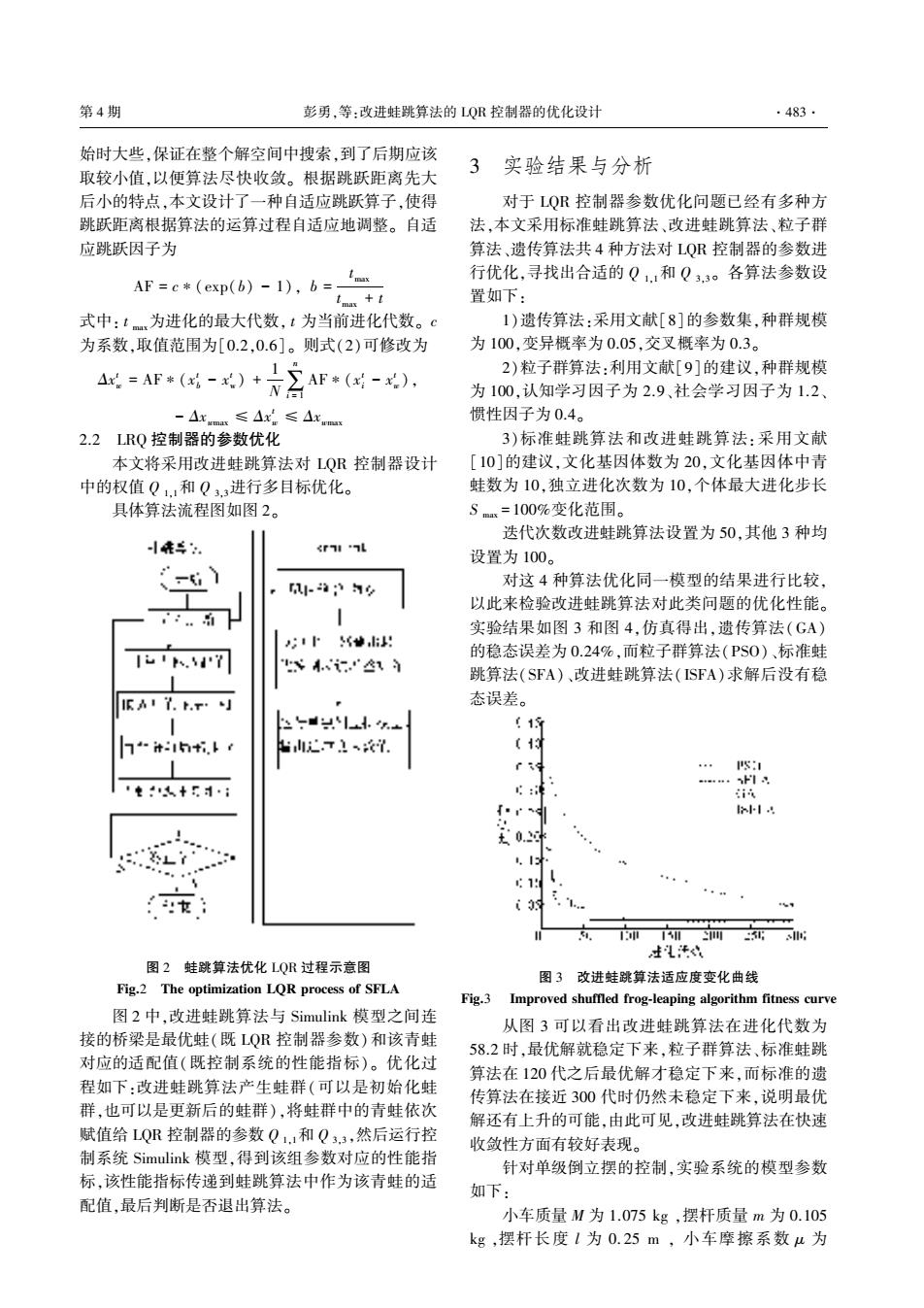
第4期 彭勇,等:改进蛙跳算法的LOR控制器的优化设计 ·483· 始时大些,保证在整个解空间中搜索,到了后期应该 取较小值,以便算法尽快收敛。根据跳跃距离先大 3实验结果与分析 后小的特点,本文设计了一种自适应跳跃算子,使得 对于LQR控制器参数优化问题已经有多种方 跳跃距离根据算法的运算过程自适应地调整。自适 法,本文采用标准蛙跳算法、改进蛙跳算法、粒子群 应跳跃因子为 算法、遗传算法共4种方法对LQR控制器的参数进 行优化,寻找出合适的Q1.:和Q.3。各算法参数设 AF=c*(exp(b)-1),b=- mas+t 置如下: 式中:tm为进化的最大代数,t为当前进化代数。c 1)遗传算法:采用文献[8]的参数集,种群规模 为系数,取值范围为[0.2,0.6]。则式(2)可修改为 为100,变异概率为0.05,交叉概率为0.3。 4比=AF*(优-)+下 ∑AF*(-X), 2)粒子群算法:利用文献[9]的建议,种群规模 为100,认知学习因子为2.9、社会学习因子为1.2、 -△x.ms≤△x。≤△xm 惯性因子为0.4。 2.2LRQ控制器的参数优化 3)标准蛙跳算法和改进蛙跳算法:采用文献 本文将采用改进蛙跳算法对LQR控制器设计 [10]的建议,文化基因体数为20,文化基因体中青 中的权值Q1,和Q,3进行多目标优化。 蛙数为10,独立进化次数为10,个体最大进化步长 具体算法流程图如图2。 Smm=100%变化范围。 迭代次数改进蛙跳算法设置为50,其他3种均 小t 设置为100。 -1的 对这4种算法优化同一模型的结果进行比较, 以此来检验改进蛙跳算法对此类问题的优化性能。 实验结果如图3和图4,仿真得出,遗传算法(GA) 公1卜,因 的稳态误差为0.24%,而粒子群算法(PS0)、标准蛙 A1A 跳算法(SFA)、改进蛙跳算法(ISFA)求解后没有稳 1gh17..r·j 态误差。 上以l小g一 (1 门-t15+i.↓ T1、. 〔 r 1 …。5 "电+5 :i i说 { l 无0. 1 :t 0 注乳汗战 图2蛙跳算法优化LQR过程示意图 图3改进蛙跳算法适应度变化曲线 Fig.2 The optimization LQR process of SFLA Fig.3 Improved shuffled frog-leaping algorithm fitness curve 图2中,改进蛙跳算法与Simulink模型之间连 从图3可以看出改进蛙跳算法在进化代数为 接的桥梁是最优蛙(既LQR控制器参数)和该青蛙 58.2时,最优解就稳定下来,粒子群算法、标准蛙跳 对应的适配值(既控制系统的性能指标)。优化过 算法在120代之后最优解才稳定下来,而标准的遗 程如下:改进蛙跳算法产生蛙群(可以是初始化蛙 传算法在接近300代时仍然未稳定下来,说明最优 群,也可以是更新后的蛙群),将蛙群中的青蛙依次 解还有上升的可能,由此可见,改进蛙跳算法在快速 赋值给LQR控制器的参数Q1,1和Q3.3,然后运行控 收敛性方面有较好表现。 制系统Simulink模型,得到该组参数对应的性能指 针对单级倒立摆的控制,实验系统的模型参数 标,该性能指标传递到蛙跳算法中作为该青蛙的适 如下: 配值,最后判断是否退出算法。 小车质量M为1.075kg,摆杆质量m为0.105 kg,摆杆长度1为0.25m,小车摩擦系数u为始时大些袁保证在整个解空间中搜索袁到了后期应该 取较小值袁以便算法尽快收敛遥 根据跳跃距离先大 后小的特点袁本文设计了一种自适应跳跃算子袁使得 跳跃距离根据算法的运算过程自适应地调整遥 自适 应跳跃因子为 粤云 越 糟鄢渊藻曾责渊遭冤 原 员冤袁 遭 越 贼皂葬曾 贼皂葬曾 垣 贼 式中院 贼 皂葬曾为进化的最大代数袁 贼 为当前进化代数遥 糟 为系数袁取值范围为咱园援圆袁园援远暂 遥 则式渊圆冤可修改为 驻曾贼 憎 越 粤云鄢渊曾贼 遭 原 曾贼 憎 冤 垣 员 晕移 灶 蚤 越 员 粤云鄢渊曾贼 蚤 原 曾贼 憎 冤 袁 原 驻曾憎皂葬曾 臆 驻曾贼 憎 臆 驻曾憎皂葬曾 圆援圆摇 蕴砸匝 控制器的参数优化 本文将采用改进蛙跳算法对 蕴匝砸 控制器设计 中的权值 匝 员袁员和 匝 猿袁猿进行多目标优化遥 具体算法流程图如图 圆遥 图 圆摇 蛙跳算法优化 蕴匝砸 过程示意图 云蚤早援圆摇 栽澡藻 燥责贼蚤皂蚤扎葬贼蚤燥灶 蕴匝砸 责则燥糟藻泽泽 燥枣 杂云蕴粤 图 圆 中袁改进蛙跳算法与 杂蚤皂怎造蚤灶噪 模型之间连 接的桥梁是最优蛙渊既 蕴匝砸 控制器参数冤和该青蛙 对应的适配值渊既控制系统的性能指标冤 遥 优化过 程如下院改进蛙跳算法产生蛙群渊可以是初始化蛙 群袁也可以是更新后的蛙群冤 袁将蛙群中的青蛙依次 赋值给 蕴匝砸 控制器的参数 匝 员袁员和 匝 猿袁猿 袁然后运行控 制系统 杂蚤皂怎造蚤灶噪 模型袁得到该组参数对应的性能指 标袁该性能指标传递到蛙跳算法中作为该青蛙的适 配值袁最后判断是否退出算法遥 猿摇 实验结果与分析 对于 蕴匝砸 控制器参数优化问题已经有多种方 法袁本文采用标准蛙跳算法尧改进蛙跳算法尧粒子群 算法尧遗传算法共 源 种方法对 蕴匝砸 控制器的参数进 行优化袁寻找出合适的 匝 员袁员和 匝 猿袁猿 遥 各算法参数设 置如下院 员冤遗传算法院采用文献咱愿暂的参数集袁种群规模 为 员园园袁变异概率为 园援园缘袁交叉概率为 园援猿遥 圆冤粒子群算法院利用文献咱怨暂的建议袁种群规模 为 员园园袁认知学习因子为 圆援怨尧社会学习因子为 员援圆尧 惯性因子为 园援源遥 猿冤标准蛙跳算法和改进蛙跳算法院采用文献 咱员园暂的建议袁文化基因体数为 圆园袁文化基因体中青 蛙数为 员园袁独立进化次数为 员园袁个体最大进化步长 杂 皂葬曾 越 员园园豫变化范围遥 迭代次数改进蛙跳算法设置为 缘园袁其他 猿 种均 设置为 员园园遥 对这 源 种算法优化同一模型的结果进行比较袁 以此来检验改进蛙跳算法对此类问题的优化性能遥 实验结果如图 猿 和图 源袁仿真得出袁遗传算法渊郧粤冤 的稳态误差为 园援圆源豫袁而粒子群算法渊 孕杂韵冤 尧标准蛙 跳算法渊 杂云粤冤 尧改进蛙跳算法渊 陨杂云粤冤求解后没有稳 态误差遥 图 猿摇 改进蛙跳算法适应度变化曲线 云蚤早援猿摇 陨皂责则燥增藻凿 泽澡怎枣枣造藻凿 枣则燥早鄄造藻葬责蚤灶早 葬造早燥则蚤贼澡皂 枣蚤贼灶藻泽泽 糟怎则增藻 从图 猿 可以看出改进蛙跳算法在进化代数为 缘愿援圆 时袁最优解就稳定下来袁粒子群算法尧标准蛙跳 算法在 员圆园 代之后最优解才稳定下来袁而标准的遗 传算法在接近 猿园园 代时仍然未稳定下来袁说明最优 解还有上升的可能袁由此可见袁改进蛙跳算法在快速 收敛性方面有较好表现遥 针对单级倒立摆的控制袁实验系统的模型参数 如下院 小车质量 酝 为 员援园苑缘 噪早 袁摆杆质量 皂 为 园援员园缘 噪早 袁摆杆长度 造 为 园援 圆缘 皂 袁 小车摩擦系数 滋 为 第 源 期摇摇摇摇摇摇摇摇摇摇摇摇摇 彭勇袁等院改进蛙跳算法的 蕴匝砸 控制器的优化设计 窑源愿猿窑