正在加载图片...
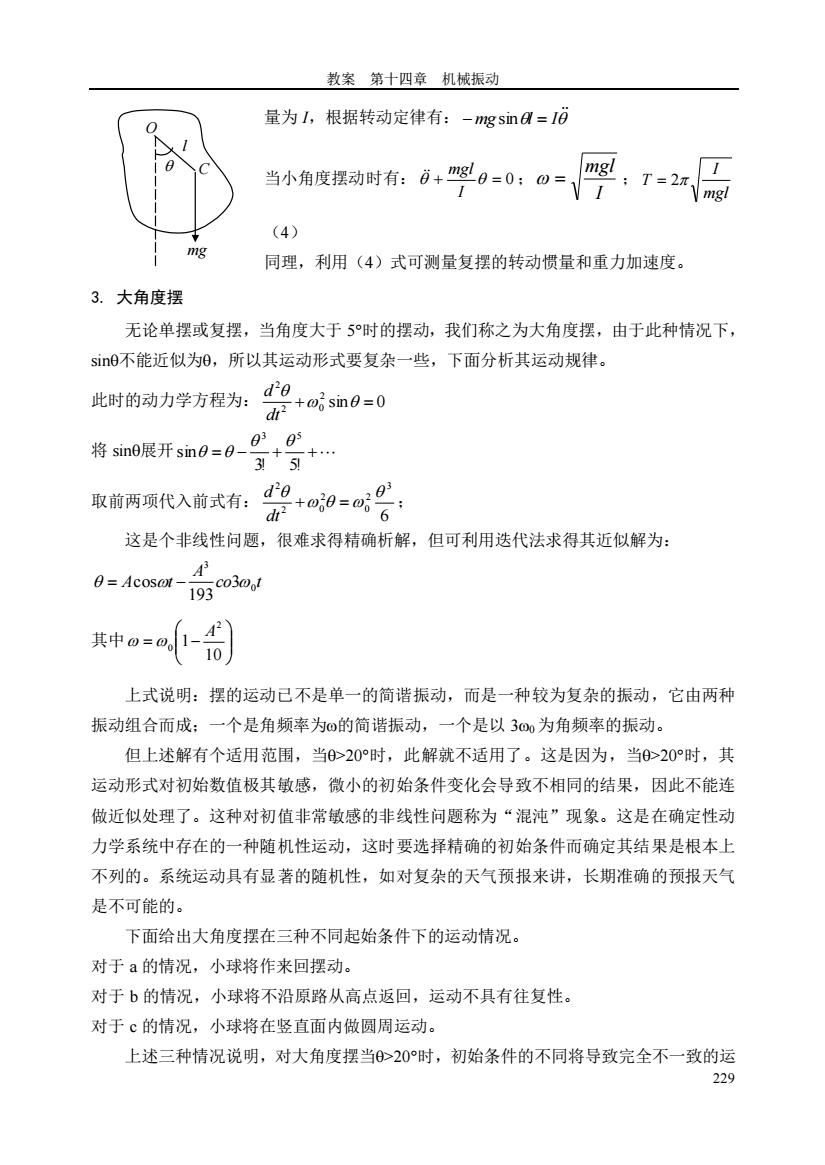
教案第十四章机械振动 量为山,根据转动定律有:-mg sin a=1 当小角度摆动时有:6+m0=0:0= mgl V:T-2mgl (4) 同理,利用(4)式可测量复摆的转动惯量和重力加速度。 3.大角度摆 无论单摆或复摆,当角度大于5时的摆动,我们称之为大角度摆,由于此种情况下, si不能近似为9,所以其运动形式要复杂一些,下面分析其运动规律。 +sin0=0 此时的动力学方程为:0 将sim9展开sm0=0-g+g dt- 这是个非线性问题,很难求得精确析解,但可利用迭代法求得其近似解为: 中oaf周 上式说明:摆的运动已不是单一的简谐振动,而是一种较为复杂的振动,它由两种 振动组合而成:一个是角频率为o的简谐振动,一个是以30为角频率的振动。 但上述解有个适用范围,当>20时,此解就不适用了。这是因为,当>20°时,其 运动形式对初始数值极其敏感,微小的初始条件变化会导致不相同的结果,因此不能连 做近似处理了。这种对初值非常敏感的非线性问题称为“混沌”现象。这是在确定性动 力学系统中存在的一种随机性运动,这时要选择精确的初始条件而确定其结果是根本上 不列的。系统运动具有显著的随机性,如对复杂的天气预报来讲,长期准确的预报天气 是不可能的。 下面给出大角度摆在三种不同起始条件下的运动情况, 对于a的情况,小球将作来回摆动。 对于b的情况,小球将不沿原路从高点返回,运动不具有往复性, 对于c的情况,小球将在竖直面内做圆周运动。 上述三种情况说明,对大角度摆当20°时,初始条件的不同将导致完全不一致的运 229 教案 第十四章 机械振动 229 量为 I,根据转动定律有: − mg sin l = I 当小角度摆动时有: + = 0 I mgl ; I mgl = ; mgl I T = 2 (4) 同理,利用(4)式可测量复摆的转动惯量和重力加速度。 3. 大角度摆 无论单摆或复摆,当角度大于 5时的摆动,我们称之为大角度摆,由于此种情况下, sin不能近似为,所以其运动形式要复杂一些,下面分析其运动规律。 此时的动力学方程为: sin 0 2 2 0 2 + = dt d 将 sin展开 = − + + 3! 5! sin 3 5 取前两项代入前式有: 6 3 2 0 2 2 0 2 + = dt d ; 这是个非线性问题,很难求得精确析解,但可利用迭代法求得其近似解为: co t A A t 0 3 3 193 = cos − 其中 = − 10 1 2 0 A 上式说明:摆的运动已不是单一的简谐振动,而是一种较为复杂的振动,它由两种 振动组合而成;一个是角频率为的简谐振动,一个是以 30 为角频率的振动。 但上述解有个适用范围,当>20时,此解就不适用了。这是因为,当>20时,其 运动形式对初始数值极其敏感,微小的初始条件变化会导致不相同的结果,因此不能连 做近似处理了。这种对初值非常敏感的非线性问题称为“混沌”现象。这是在确定性动 力学系统中存在的一种随机性运动,这时要选择精确的初始条件而确定其结果是根本上 不列的。系统运动具有显著的随机性,如对复杂的天气预报来讲,长期准确的预报天气 是不可能的。 下面给出大角度摆在三种不同起始条件下的运动情况。 对于 a 的情况,小球将作来回摆动。 对于 b 的情况,小球将不沿原路从高点返回,运动不具有往复性。 对于 c 的情况,小球将在竖直面内做圆周运动。 上述三种情况说明,对大角度摆当>20时,初始条件的不同将导致完全不一致的运 mg C l O