正在加载图片...
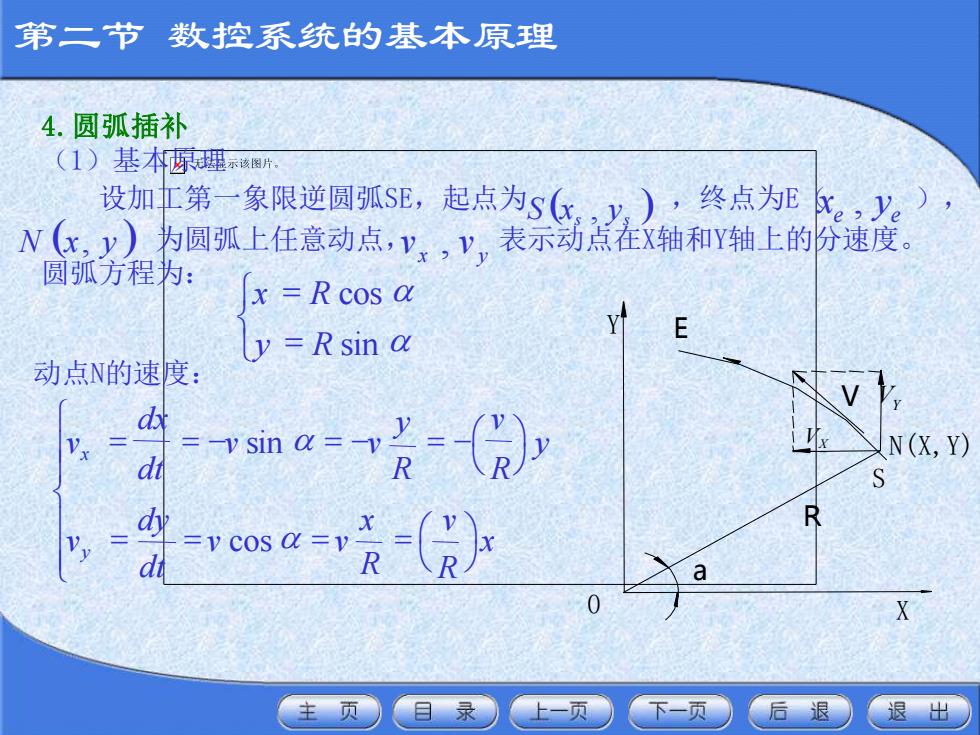
第二节数控系统的基本原理 4.圆弧插补 (1)基本原理示该图片 设加止第一象限逆圆弧SE,起点为s(。,y,)终点为Ek。,y N(x,y)为圆弧上任意动点,y,v,表示动点在X轴和Y轴上的分速度。 圆弧方程为: x =R cos a Ly=Rsin a 动点N的速度: Vx =vsin a=v N(X,Y) dt R S -v cos a=v X R -R 主页 目录 上一页 下一页 后退 退出 E V R a X Y 0 S X N(X,Y) V VY 4.圆弧插补 (1)基本原理 设加工第一象限逆圆弧SE,起点为 ,终点为E( ), 为圆弧上任意动点, 表示动点在X轴和Y轴上的分速度。 圆弧方程为: 动点N的速度: ( ) S xs ys , e e x , y N (x, y ) x y v , v = = a a sin cos y R x R = = = = = = - = - = - x R v R x v v dt dy v y R v R y v v dt dx v y x a a cos sin 第二节 数控系统的基本原理