正在加载图片...
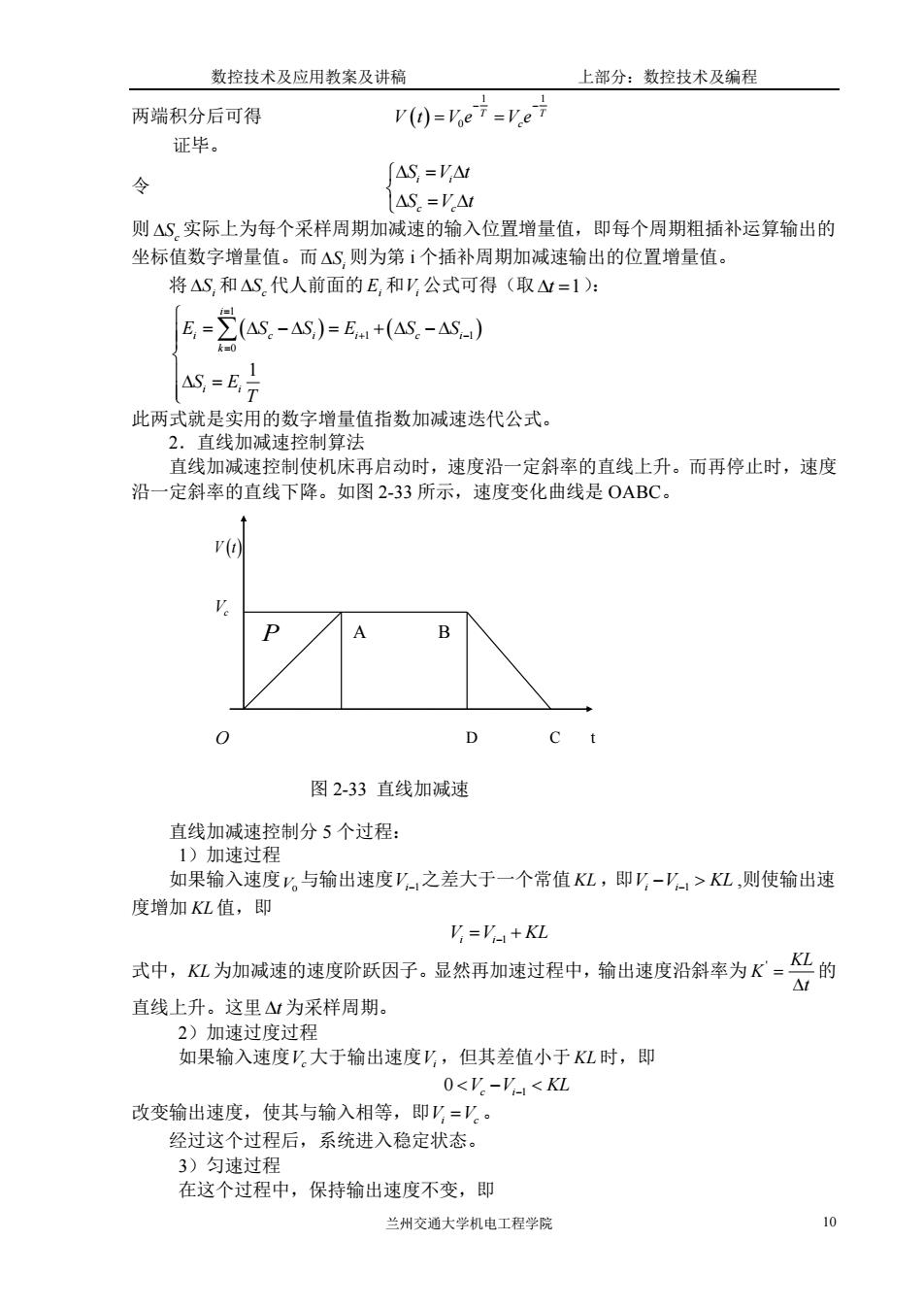
数控技术及应用教案及讲稿 上部分:数控技术及编程 两端积分后可得 V(1)=Vei-Ve 证毕。 令 △S.=V△ 则△S。实际上为每个采样周期加减速的输入位置增量值,即每个周期粗插补运算输出的 坐标值数字增量值。而△S则为第ⅰ个插补周期加减速输出的位置增量值。 将△S,和△S.代人前面的E,和V,公式可得(取=1): 5-2s-A)=E+(as-as) A=E号 此两式去的值指数加减连达代公式。 直线加减速控制使机床再启动时,速度沿一定斜率的直线上升。而再停止时,速度 沿一定斜率的直线下降。如图2-33所示,速度变化曲线是OABC。 rol D 图2-33直线加减速 直线加减速控制分5个过程: 1)加速过程 如果输入速度,与输出速度V之差大于一个常值KL,即V-V>KL,则使输出速 度增加L值,即 V=V-+KL 式中,K红为加减速的速度阶跃因子。显然再加速过程中,输出速度沿斜率为K=K仁的 直线上升。这里△为采样周期。 2)加速过度过程 如果输入速度V大于输出速度,但其差值小于KL时,即 0<'.-'< 改变输出速度,使其与输入相等,即y=V。 经过这个过程后,系统进入稳定状态。 3)匀速过程 在这个过程中,保持输出速度不变,即 兰州交通大学机电工程学院 0 数控技术及应用教案及讲稿 上部分:数控技术及编程 兰州交通大学机电工程学院 10 两端积分后可得 ( ) 1 1 0 T T V t V e V ec − − = = 证毕。 令 i i c c S V t S V t = = 则 c S 实际上为每个采样周期加减速的输入位置增量值,即每个周期粗插补运算输出的 坐标值数字增量值。而 i S 则为第 i 个插补周期加减速输出的位置增量值。 将 i S 和 c S 代人前面的 Ei 和 Vi 公式可得(取 =t 1 ): ( ) ( ) 1 1 1 0 1 i i c i i c i k i i E S S E S S S E T = + − = = − = + − = 此两式就是实用的数字增量值指数加减速迭代公式。 2.直线加减速控制算法 直线加减速控制使机床再启动时,速度沿一定斜率的直线上升。而再停止时,速度 沿一定斜率的直线下降。如图 2-33 所示,速度变化曲线是 OABC。 直线加减速控制分 5 个过程: 1)加速过程 如果输入速度 V0 与输出速度 Vi−1 之差大于一个常值 KL ,即 V V KL i i − −1 ,则使输出速 度增加 KL 值,即 V V KL i i = + −1 式中, KL 为加减速的速度阶跃因子。显然再加速过程中,输出速度沿斜率为 ' KL K t = 的 直线上升。这里 t 为采样周期。 2)加速过度过程 如果输入速度 Vc 大于输出速度 Vi ,但其差值小于 KL 时,即 1 0 − V V KL c i− 改变输出速度,使其与输入相等,即 V V i c = 。 经过这个过程后,系统进入稳定状态。 3)匀速过程 在这个过程中,保持输出速度不变,即 图 2-33 直线加减速 D C t P A B O Vc V t( )