正在加载图片...
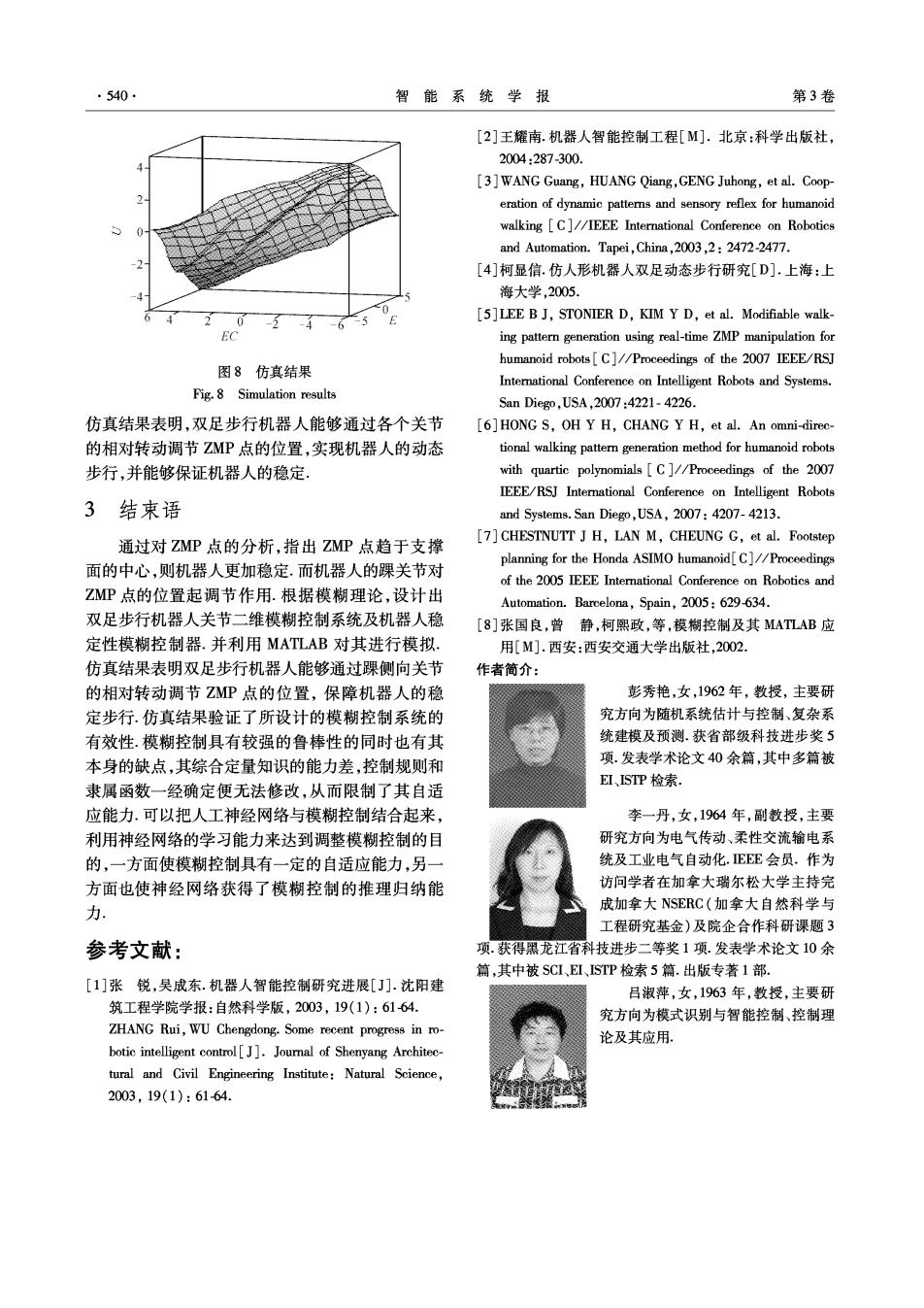
540. 智能系统学报 第3卷 [2]王耀南.机器人智能控制工程[M].北京:科学出版社, 2004:287-300. [3]WANG Guang,HUANG Qiang,GENG Juhong,et al.Coop- eration of dynamic patterns and sensory reflex for humanoid walking [C]//IEEE International Conference on Robotics and Automation.Tapei,China,2003,2:2472-2477. [4]柯显信.仿人形机器人双足动态步行研究[D].上海:上 海大学,2005. [5]LEE B J,STONIER D,KIM Y D,et al.Modifiable walk- 0 -2 ing pattern generation using real-time ZMP manipulation for humanoid robots[C]//Proceedings of the 2007 IEEE/RSJ 图8仿真结果 International Conference on Intelligent Robots and Systems. Fig.8 Simulation results San Dieg0,USA,2007:4221-4226. 仿真结果表明,双足步行机器人能够通过各个关节 [6]HONG S,OH Y H,CHANG Y H,et al.An omni-direc- 的相对转动调节△MP点的位置,实现机器人的动态 tional walking pattern generation method for humanoid robots 步行,并能够保证机器人的稳定 with quartic polynomials C]//Proceedings of the 2007 IEEE/RSJ International Conference on Intelligent Robots 3结束语 and Systems.San Diego,USA,2007:4207-4213. 通过对ZMP点的分析,指出ZMP点趋于支撑 [7]CHESTNUTT J H,LAN M,CHEUNG G,et al.Footstep planning for the Honda ASIMO humanoid[C]//Proceedings 面的中心,则机器人更加稳定.而机器人的踝关节对 of the 2005 IEEE International Conference on Robotics and ZMP点的位置起调节作用.根据模糊理论,设计出 Automation.Barcelona,Spain,2005:629-634. 双足步行机器人关节二维模糊控制系统及机器人稳 [8]张国良,曾静,柯熙政,等,模糊控制及其MATLAB应 定性模糊控制器.并利用MATLAB对其进行模拟. 用[M].西安:西安交通大学出版社,2002. 仿真结果表明双足步行机器人能够通过踝侧向关节 作者简介: 的相对转动调节ZP点的位置,保障机器人的稳 彭秀艳,女,1962年,教授,主要研 定步行.仿真结果验证了所设计的模糊控制系统的 究方向为随机系统估计与控制、复杂系 有效性.模糊控制具有较强的鲁棒性的同时也有其 统建模及预测.获省部级科技进步奖5 本身的缺点,其综合定量知识的能力差,控制规则和 项.发表学术论文40余篇,其中多篇被 EI、ISTP检索, 隶属函数一经确定便无法修改,从而限制了其自适 应能力.可以把人工神经网络与模糊控制结合起来, 李一丹,女,1964年,副教授,主要 利用神经网络的学习能力来达到调整模糊控制的目 研究方向为电气传动、柔性交流输电系 的,一方面使模糊控制具有一定的自适应能力,另一 统及工业电气自动化.EEE会员.作为 方面也使神经网络获得了模糊控制的推理归纳能 访问学者在加拿大瑞尔松大学主持完 力 成加拿大NSERC(加拿大自然科学与 工程研究基金)及院企合作科研课题3 参考文献: 项.获得黑龙江省科技进步二等奖1项.发表学术论文10余 篇,其中被SCI EI、ISTP检索5篇.出版专著1部. [1]张锐,吴成东.机器人智能控制研究进展[J].沈阳建 吕淑萍,女,1963年,教授,主要研 筑工程学院学报:自然科学版,2003,19(1):6164. 究方向为模式识别与智能控制、控制理 ZHANG Rui,WU Chengdong.Some recent progress in ro- 论及其应用。 botic intelligent control[J].Joumal of Shenyang Architec- tural and Civil Engineering Institute:Natural Science, 2003,19(1):6164