正在加载图片...
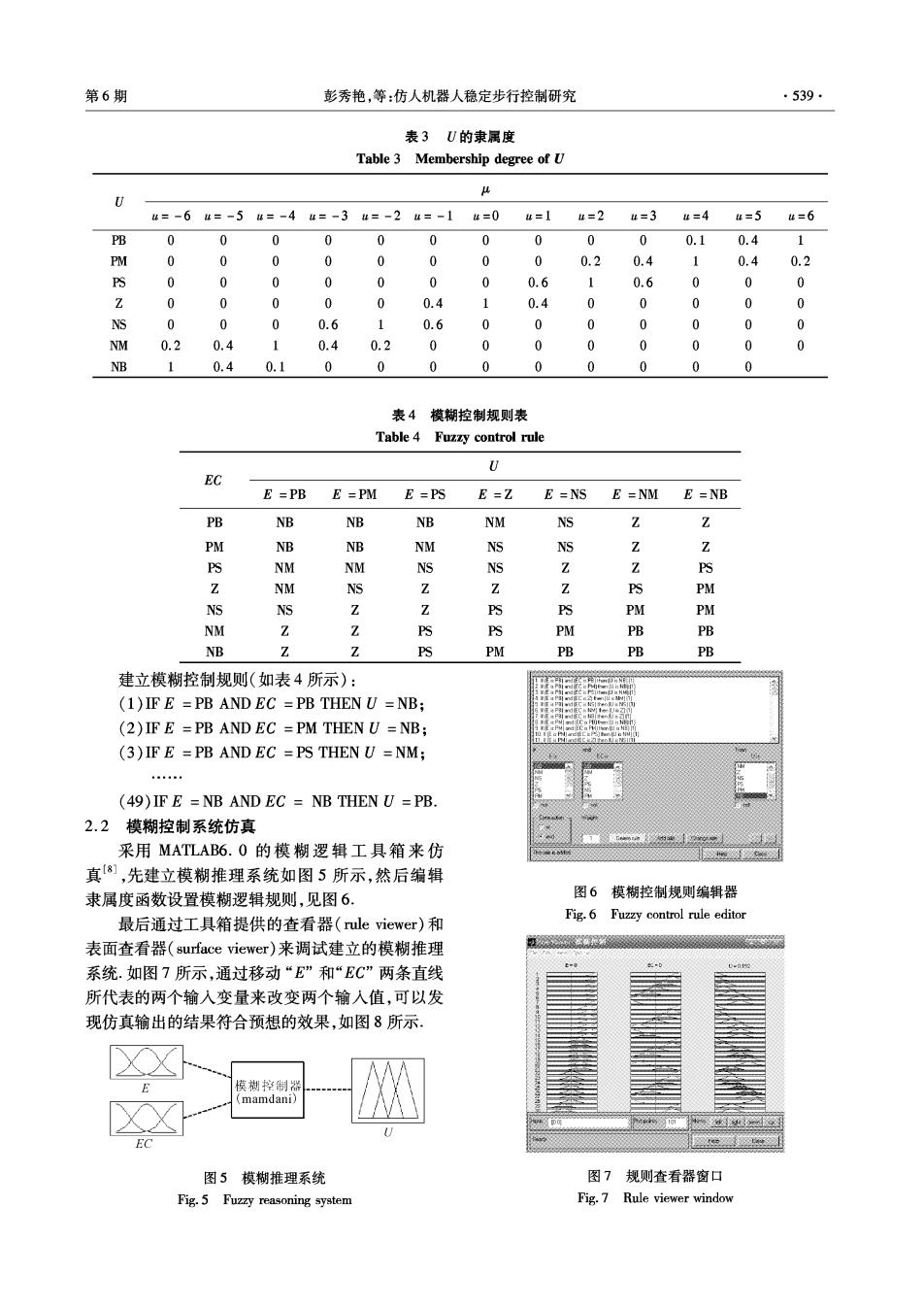
第6期 彭秀艳,等:仿人机器人稳定步行控制研究 539. 表3U的隶属度 Table 3 Membership degree of U 4 U u=-6u=-5 =-4 =-3 u=-2u=-1 u=0 u=1 u=2 u=3 u=4 u=5 u=6 PB 0 0 0 0 0 0 6 0 0 0 0.1 0.4 1 PM 0 0 0 0 0 0 0 0 0.2 0.4 1 0.4 0.2 S 0 0 0 0 0 0 0 0.6 1 0.6 0 0 0 Z 0 0 0 0 0 0.4 1 0.4 0 0 0 0 0 NS 0 0 0 0.6 1 0.6 0 0 0 0 0 0 0 NM 0.2 0.4 0.4 0.2 0 0 0 0 0 0 0 0 NB 1 0.4 0.1 0 0 0 0 0 0 0 0 0 表4模糊控制规则表 Table 4 Fuzzy control rule 0 EC E =PB E=PM E=PS E=Z E =NS E=NM E=NB PB NB NB NB NM NS Z Z PM NB NB NM NS NS 2 PS NM nm NS NS Z Z PS Z NM NS V 2 Z PS PM NS NS Z 1 PS PS PM PM NM Z PS PS PM PB PB NB Z Z PS PM PB PB PB 建立模糊控制规则(如表4所示): (1)IF E =PB AND EC PB THEN U =NB; (2)IF E =PB AND EC =PM THEN U =NB; (3)IF E PB AND EC PS THEN U =NM; (49)IF E =NB AND EC NB THEN U =PB. 2.2模糊控制系统仿真 采用MATLAB6.0的模糊逻辑工具箱来仿 真⑧],先建立模糊推理系统如图5所示,然后编辑 隶属度函数设置模糊逻辑规则,见图6. 图6模糊控制规则编辑器 最后通过工具箱提供的查看器(rule viewer))和 Fig.6 Fuzzy control rule editor 表面查看器(surface viewer)来调试建立的模糊推理 系统.如图7所示,通过移动“E”和“EC”两条直线 所代表的两个输入变量来改变两个输入值,可以发 现仿真输出的结果符合预想的效果,如图8所示. 模糊粹制器 (mamdani) U EC 图5摸糊推理系统 图7规则查看器窗口 Fig.5 Fuzzy reasoning system Fig.7 Rule viewer window