正在加载图片...
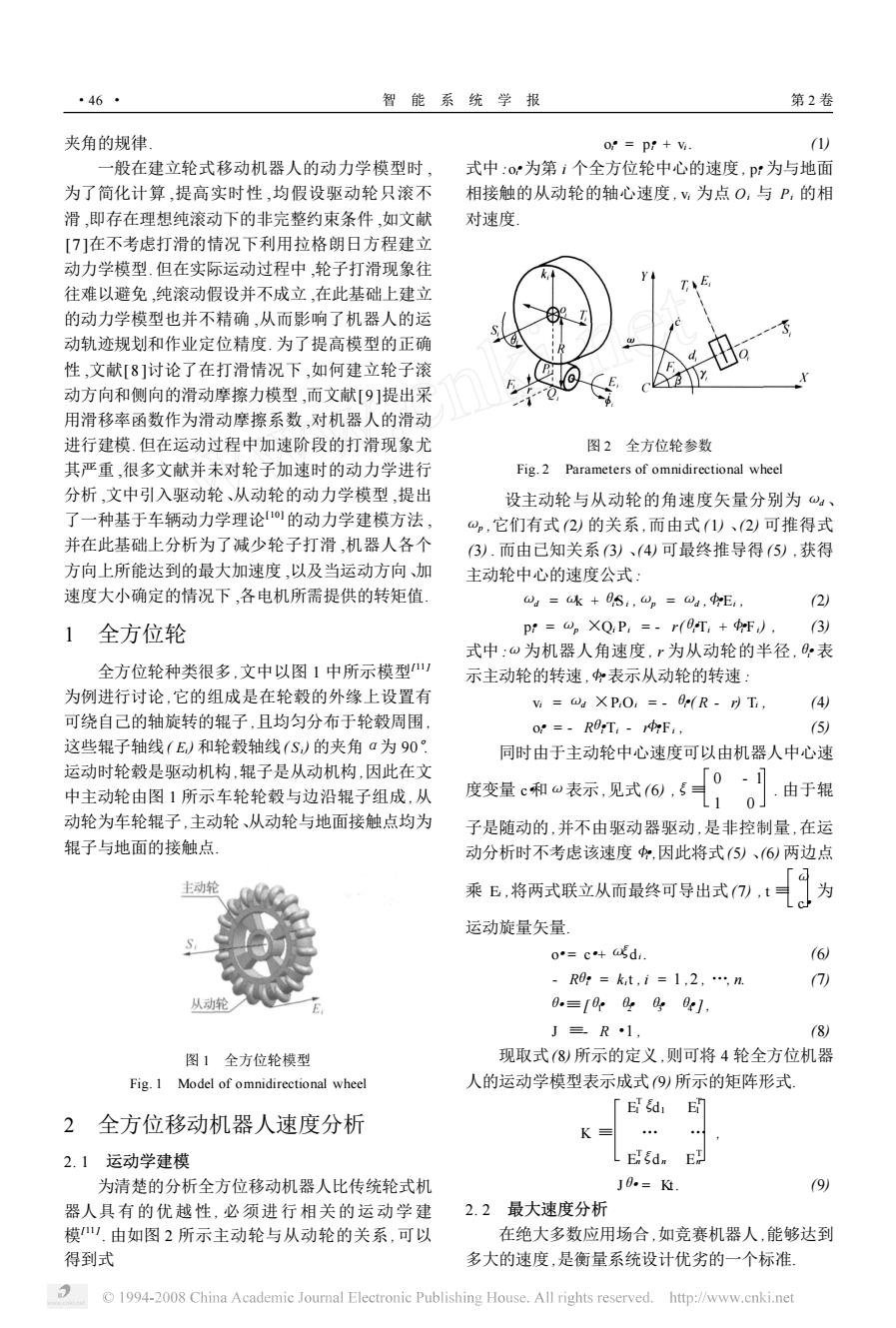
·46 智能系统学报 第2卷 夹角的规律」 o°=Pr+V. 1) 一般在建立轮式移动机器人的动力学模型时, 式中:o为第i个全方位轮中心的速度,pr为与地面 为了简化计算,提高实时性,均假设驱动轮只滚不 相接触的从动轮的轴心速度,为点O,与P,的相 滑,即存在理想纯滚动下的非完整约束条件,如文献 对速度 [7]在不考虑打滑的情况下利用拉格朗日方程建立 动力学模型.但在实际运动过程中,轮子打滑现象往 往难以避免,纯滚动假设并不成立,在此基础上建立 的动力学模型也并不精确,从而影响了机器人的运 动轨迹规划和作业定位精度.为了提高模型的正确 性,文献[8]讨论了在打滑情况下,如何建立轮子滚 动方向和侧向的滑动摩擦力模型,而文献[9]提出采 用滑移率函数作为滑动摩擦系数,对机器人的滑动 进行建模.但在运动过程中加速阶段的打滑现象尤 图2全方位轮参数 其严重,很多文献并未对轮子加速时的动力学进行 Fig.2 Parameters of omnidirectional wheel 分析,文中引入驱动轮、从动轮的动力学模型,提出 设主动轮与从动轮的角速度矢量分别为:、 了一种基于车辆动力学理论1的动力学建模方法, ,它们有式2)的关系,而由式1)、(2)可推得式 并在此基础上分析为了减少轮子打滑,机器人各个 3).而由己知关系3)、(4)可最终推导得(5),获得 方向上所能达到的最大加速度,以及当运动方向、加 主动轮中心的速度公式: 速度大小确定的情况下,各电机所需提供的转矩值」 ⊙a=k+6:,0p=4,E, (2) 1全方位轮 pr @p XQ:P,=-r(0T,+) (3) 式中:ω为机器人角速度,r为从动轮的半径,?表 全方位轮种类很多,文中以图1中所示模型 示主动轮的转速,$表示从动轮的转速: 为例进行讨论,它的组成是在轮毂的外缘上设置有 vi =@a XPiO =-0(R-r)T, (4) 可绕自己的轴旋转的辊子,且均匀分布于轮毂周围。 o°=-R0T:-F, (5) 这些辊子轴线(E)和轮毂轴线(S)的夹角a为90° 同时由于主动轮中心速度可以由机器人中心速 运动时轮毂是驱动机构,辊子是从动机构,因此在文 中主动轮由图1所示车轮轮毂与边沿辊子组成,从 度变量c和u表示,见式16,50 .由于辊 动轮为车轮辊子,主动轮、从动轮与地面接触点均为 子是随动的,并不由驱动器驱动,是非控制量,在运 辊子与地面的接触点 动分析时不考虑该速度,因此将式5)、(6)两边点 主动轮 乘E,将两式联立从而最终可导出式(7),t目 为 运动旋量矢量 o=c+adi. (6) -R0:=kt,i=1,2,…n o 从动轮 0.≡[440l, J三R·1. (8) 图1全方位轮模型 现取式8)所示的定义,则可将4轮全方位机器 Fig.I Model of omnidirectional wheel 人的运动学模型表示成式9)所示的矩阵形式. 「 Ef d E 2全方位移动机器人速度分析 K≡ … 2.1运动学建模 LEiSd ET 为清楚的分析全方位移动机器人比传统轮式机 J0.=K (9) 器人具有的优越性,必须进行相关的运动学建 2.2最大速度分析 模).由如图2所示主动轮与从动轮的关系,可以 在绝大多数应用场合,如竞赛机器人,能够达到 得到式 多大的速度,是衡量系统设计优劣的一个标准 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net夹角的规律. 一般在建立轮式移动机器人的动力学模型时 , 为了简化计算 ,提高实时性 ,均假设驱动轮只滚不 滑 ,即存在理想纯滚动下的非完整约束条件 ,如文献 [7 ]在不考虑打滑的情况下利用拉格朗日方程建立 动力学模型. 但在实际运动过程中 ,轮子打滑现象往 往难以避免 ,纯滚动假设并不成立 ,在此基础上建立 的动力学模型也并不精确 ,从而影响了机器人的运 动轨迹规划和作业定位精度. 为了提高模型的正确 性 ,文献[ 8 ]讨论了在打滑情况下 ,如何建立轮子滚 动方向和侧向的滑动摩擦力模型 ,而文献[9 ]提出采 用滑移率函数作为滑动摩擦系数 ,对机器人的滑动 进行建模. 但在运动过程中加速阶段的打滑现象尤 其严重 ,很多文献并未对轮子加速时的动力学进行 分析 ,文中引入驱动轮、从动轮的动力学模型 ,提出 了一种基于车辆动力学理论[10 ]的动力学建模方法 , 并在此基础上分析为了减少轮子打滑 ,机器人各个 方向上所能达到的最大加速度 ,以及当运动方向、加 速度大小确定的情况下 ,各电机所需提供的转矩值. 1 全方位轮 全方位轮种类很多 ,文中以图 1 中所示模型[11 ] 为例进行讨论 ,它的组成是在轮毂的外缘上设置有 可绕自己的轴旋转的辊子 ,且均匀分布于轮毂周围 , 这些辊子轴线( Ei) 和轮毂轴线( S i) 的夹角α为 90°. 运动时轮毂是驱动机构 ,辊子是从动机构 ,因此在文 中主动轮由图 1 所示车轮轮毂与边沿辊子组成 ,从 动轮为车轮辊子 ,主动轮、从动轮与地面接触点均为 辊子与地面的接触点. 图 1 全方位轮模型 Fig. 1 Model of omnidirectional wheel 2 全方位移动机器人速度分析 2. 1 运动学建模 为清楚的分析全方位移动机器人比传统轮式机 器人具有的优越性 , 必须进行相关的运动学建 模[11 ] . 由如图 2 所示主动轮与从动轮的关系 ,可以 得到式 o·i = p·i + vi . (1) 式中 :o·i 为第 i 个全方位轮中心的速度 , p·i 为与地面 相接触的从动轮的轴心速度 , vi 为点 Oi 与 Pi 的相 对速度. 图 2 全方位轮参数 Fig. 2 Parameters of omnidirectional wheel 设主动轮与从动轮的角速度矢量分别为 ωd 、 ωp ,它们有式 (2) 的关系 ,而由式 (1) 、(2) 可推得式 (3) . 而由已知关系(3) 、(4) 可最终推导得(5) ,获得 主动轮中心的速度公式 : ωd = ωk +θ·iSi ,ωp = ωd , <·i Ei , (2) p·i = ωp ×Qi Pi = - r(θ·i Ti + <·i Fi) , (3) 式中 :ω为机器人角速度 , r 为从动轮的半径 ,θ·i 表 示主动轮的转速 , <·i 表示从动轮的转速 : vi = ωd ×PiOi = - θ·i ( R - r) Ti , (4) o·i = - Rθ·i Ti - r<·i Fi , (5) 同时由于主动轮中心速度可以由机器人中心速 度变量 c·和ω表示 ,见式 (6) ,ξ≡ 0 - 1 1 0 . 由于辊 子是随动的 ,并不由驱动器驱动 ,是非控制量 ,在运 动分析时不考虑该速度 <·i ,因此将式(5) 、(6) 两边点 乘 Ei ,将两式联立从而最终可导出式(7) , t ≡ ω c· 为 运动旋量矢量. o·= c·+ωξdi . (6) - Rθ·i = ki t , i = 1 ,2 , …, n. (7) θ·≡[θ·1 θ·2 θ·3 θ·4 ] , J ≡- R ·1 , (8) 现取式(8) 所示的定义 ,则可将 4 轮全方位机器 人的运动学模型表示成式(9) 所示的矩阵形式. K ≡ E T 1ξd1 E T 1 … … E T nξdn E T n , Jθ·= Kt . (9) 2. 2 最大速度分析 在绝大多数应用场合 ,如竞赛机器人 ,能够达到 多大的速度 ,是衡量系统设计优劣的一个标准. · 64 · 智 能 系 统 学 报 第 2 卷