正在加载图片...
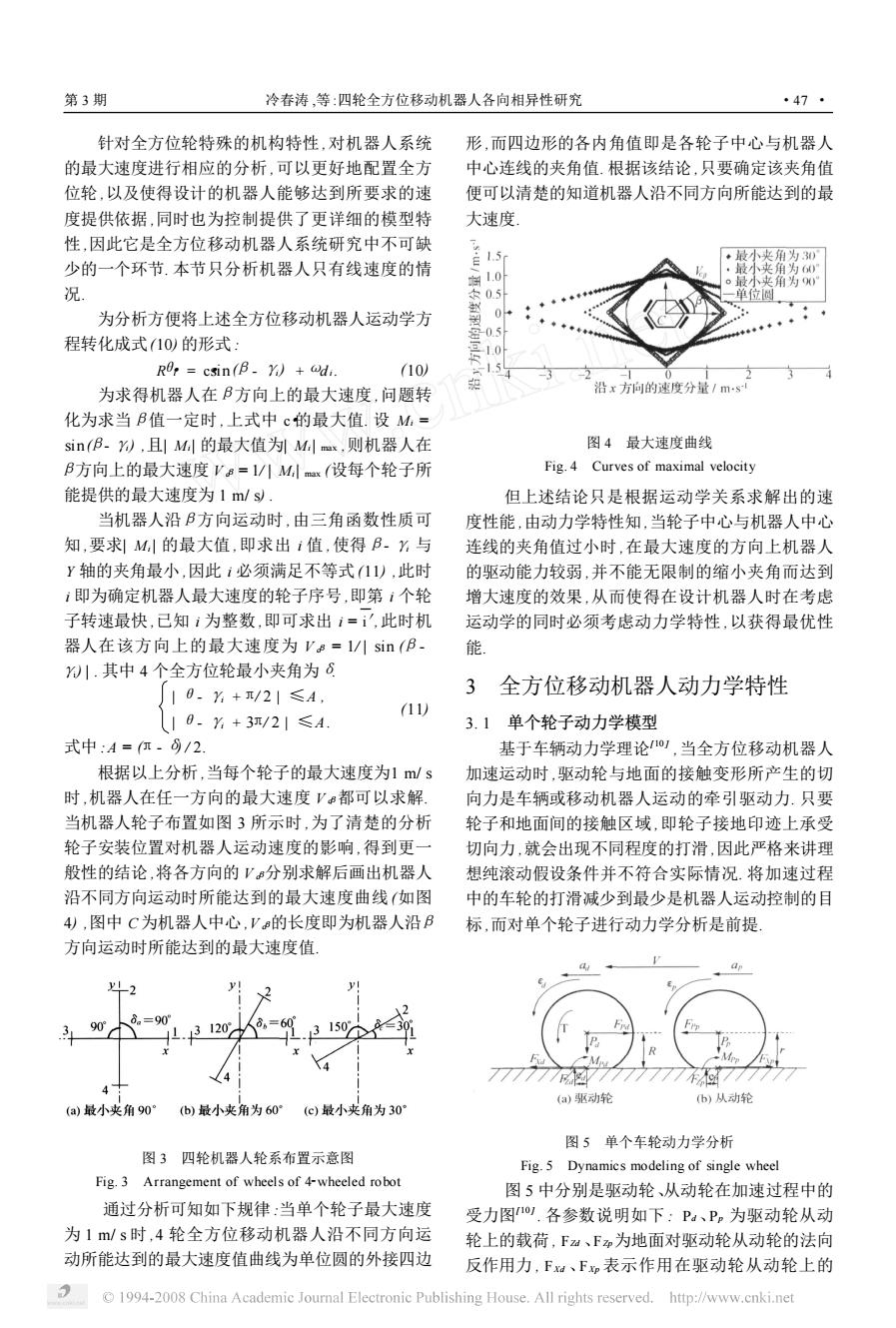
第3期 冷春涛,等:四轮全方位移动机器人各向相异性研究 ·47· 针对全方位轮特殊的机构特性,对机器人系统 形,而四边形的各内角值即是各轮子中心与机器人 的最大速度进行相应的分析,可以更好地配置全方 中心连线的夹角值.根据该结论,只要确定该夹角值 位轮,以及使得设计的机器人能够达到所要求的速 便可以清楚的知道机器人沿不同方向所能达到的最 度提供依据,同时也为控制提供了更详细的模型特 大速度 性,因此它是全方位移动机器人系统研究中不可缺 1.5 最小夹角为3) 少的一个环节.本节只分析机器人只有线速度的情 夹角为6) 1.0 况 0.5 为分析方便将上述全方位移动机器人运动学方 0+ 程转化成式10)的形式: 0.5 10 ROr csin(B Y)+@di. (10) 为求得机器人在B方向上的最大速度,问题转 沿x方向的速度分量/m·s 化为求当B值一定时,上式中c的最大值.设M= sin(B.),且lM的最大值为列Mms,则机器人在 图4最大速度曲线 B方向上的最大速度VB=1/八Max(设每个轮子所 Fig.4 Curves of maximal velocity 能提供的最大速度为1m/s. 但上述结论只是根据运动学关系求解出的速 当机器人沿B方向运动时,由三角函数性质可 度性能,由动力学特性知,当轮子中心与机器人中心 知,要求!M的最大值,即求出i值,使得B.Y与 连线的夹角值过小时,在最大速度的方向上机器人 Y轴的夹角最小,因此i必须满足不等式(11),此时 的驱动能力较弱,并不能无限制的缩小夹角而达到 i即为确定机器人最大速度的轮子序号,即第ⅰ个轮 增大速度的效果,从而使得在设计机器人时在考虑 子转速最快,已知i为整数,即可求出i=i',此时机 运动学的同时必须考虑动力学特性,以获得最优性 器人在该方向上的最大速度为VB=1/八sin(B- 能 )川.其中4个全方位轮最小夹角为6 0-+/2|≤A, 3全方位移动机器人动力学特性 (11) |0.出+3/21≤A. 3.1单个轮子动力学模型 式中:A=m-/2. 基于车辆动力学理论,当全方位移动机器人 根据以上分析,当每个轮子的最大速度为1m/s 加速运动时,驱动轮与地面的接触变形所产生的切 时,机器人在任一方向的最大速度V®都可以求解. 向力是车辆或移动机器人运动的牵引驱动力.只要 当机器人轮子布置如图3所示时,为了清楚的分析 轮子和地面间的接触区域,即轮子接地印迹上承受 轮子安装位置对机器人运动速度的影响,得到更一 切向力,就会出现不同程度的打滑,因此严格来讲理 般性的结论,将各方向的V分别求解后画出机器人 想纯滚动假设条件并不符合实际情况.将加速过程 沿不同方向运动时所能达到的最大速度曲线(如图 中的车轮的打滑减少到最少是机器人运动控制的目 4),图中C为机器人中心,V的长度即为机器人沿B 标,而对单个轮子进行动力学分析是前提 方向运动时所能达到的最大速度值 4 2 90 (a)驱动轮 (b)从动轮 (a)最小夹角90 (b)最小夹角为60° (c)最小夹角为30° 图5单个车轮动力学分析 图3四轮机器人轮系布置示意图 Fig.5 Dynamics modeling of single wheel Fig.3 Arrangement of wheels of 4-wheeled robot 图5中分别是驱动轮、从动轮在加速过程中的 通过分析可知如下规律:当单个轮子最大速度 受力图,.各参数说明如下:Pa、Pp为驱动轮从动 为1m/s时,4轮全方位移动机器人沿不同方向运 轮上的载荷,F弘、Fp为地面对驱动轮从动轮的法向 动所能达到的最大速度值曲线为单位圆的外接四边 反作用力,Fa、Fp表示作用在驱动轮从动轮上的 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net针对全方位轮特殊的机构特性 ,对机器人系统 的最大速度进行相应的分析 ,可以更好地配置全方 位轮 ,以及使得设计的机器人能够达到所要求的速 度提供依据 ,同时也为控制提供了更详细的模型特 性 ,因此它是全方位移动机器人系统研究中不可缺 少的一个环节. 本节只分析机器人只有线速度的情 况. 为分析方便将上述全方位移动机器人运动学方 程转化成式(10) 的形式 : Rθ·i = c·sin (β- γi) +ωd i . (10) 为求得机器人在β方向上的最大速度 ,问题转 化为求当β值一定时 ,上式中 c·的最大值. 设 Mi = sin (β- γi) ,且| Mi | 的最大值为| Mi | max ,则机器人在 β方向上的最大速度 V βc = 1/ | Mi | max (设每个轮子所 能提供的最大速度为 1 m/ s) . 当机器人沿β方向运动时 ,由三角函数性质可 知 ,要求| Mi | 的最大值 ,即求出 i 值 ,使得β- γi 与 Y 轴的夹角最小 ,因此 i 必须满足不等式(11) ,此时 i 即为确定机器人最大速度的轮子序号 ,即第 i 个轮 子转速最快 ,已知 i 为整数 ,即可求出 i = i′,此时机 器人在该方向上的最大速度为 V βc = 1/ | sin (β- γi) | . 其中 4 个全方位轮最小夹角为δ. | θ- γi +π/ 2 | ≤A , | θ- γi + 3π/ 2 | ≤A . (11) 式中 :A = (π- δ) / 2. 根据以上分析 ,当每个轮子的最大速度为1 m/ s 时 ,机器人在任一方向的最大速度 V βc 都可以求解. 当机器人轮子布置如图 3 所示时 ,为了清楚的分析 轮子安装位置对机器人运动速度的影响 ,得到更一 般性的结论 ,将各方向的 V βc 分别求解后画出机器人 沿不同方向运动时所能达到的最大速度曲线 (如图 4) ,图中 C为机器人中心 ,V βc 的长度即为机器人沿β 方向运动时所能达到的最大速度值. 图 3 四轮机器人轮系布置示意图 Fig. 3 Arrangement of wheels of 42wheeled robot 通过分析可知如下规律 :当单个轮子最大速度 为 1 m/ s 时 ,4 轮全方位移动机器人沿不同方向运 动所能达到的最大速度值曲线为单位圆的外接四边 形 ,而四边形的各内角值即是各轮子中心与机器人 中心连线的夹角值. 根据该结论 ,只要确定该夹角值 便可以清楚的知道机器人沿不同方向所能达到的最 大速度. 图 4 最大速度曲线 Fig. 4 Curves of maximal velocity 但上述结论只是根据运动学关系求解出的速 度性能 ,由动力学特性知 ,当轮子中心与机器人中心 连线的夹角值过小时 ,在最大速度的方向上机器人 的驱动能力较弱 ,并不能无限制的缩小夹角而达到 增大速度的效果 ,从而使得在设计机器人时在考虑 运动学的同时必须考虑动力学特性 ,以获得最优性 能. 3 全方位移动机器人动力学特性 3. 1 单个轮子动力学模型 基于车辆动力学理论[10 ] ,当全方位移动机器人 加速运动时 ,驱动轮与地面的接触变形所产生的切 向力是车辆或移动机器人运动的牵引驱动力. 只要 轮子和地面间的接触区域 ,即轮子接地印迹上承受 切向力 ,就会出现不同程度的打滑 ,因此严格来讲理 想纯滚动假设条件并不符合实际情况. 将加速过程 中的车轮的打滑减少到最少是机器人运动控制的目 标 ,而对单个轮子进行动力学分析是前提. 图 5 单个车轮动力学分析 Fig. 5 Dynamics modeling of single wheel 图 5 中分别是驱动轮、从动轮在加速过程中的 受力图[10 ] . 各参数说明如下 : Pd 、Pp 为驱动轮从动 轮上的载荷 , FZd 、FZp为地面对驱动轮从动轮的法向 反作用力 , FXd 、FXp 表示作用在驱动轮从动轮上的 第 3 期 冷春涛 ,等 :四轮全方位移动机器人各向相异性研究 · 74 ·