正在加载图片...
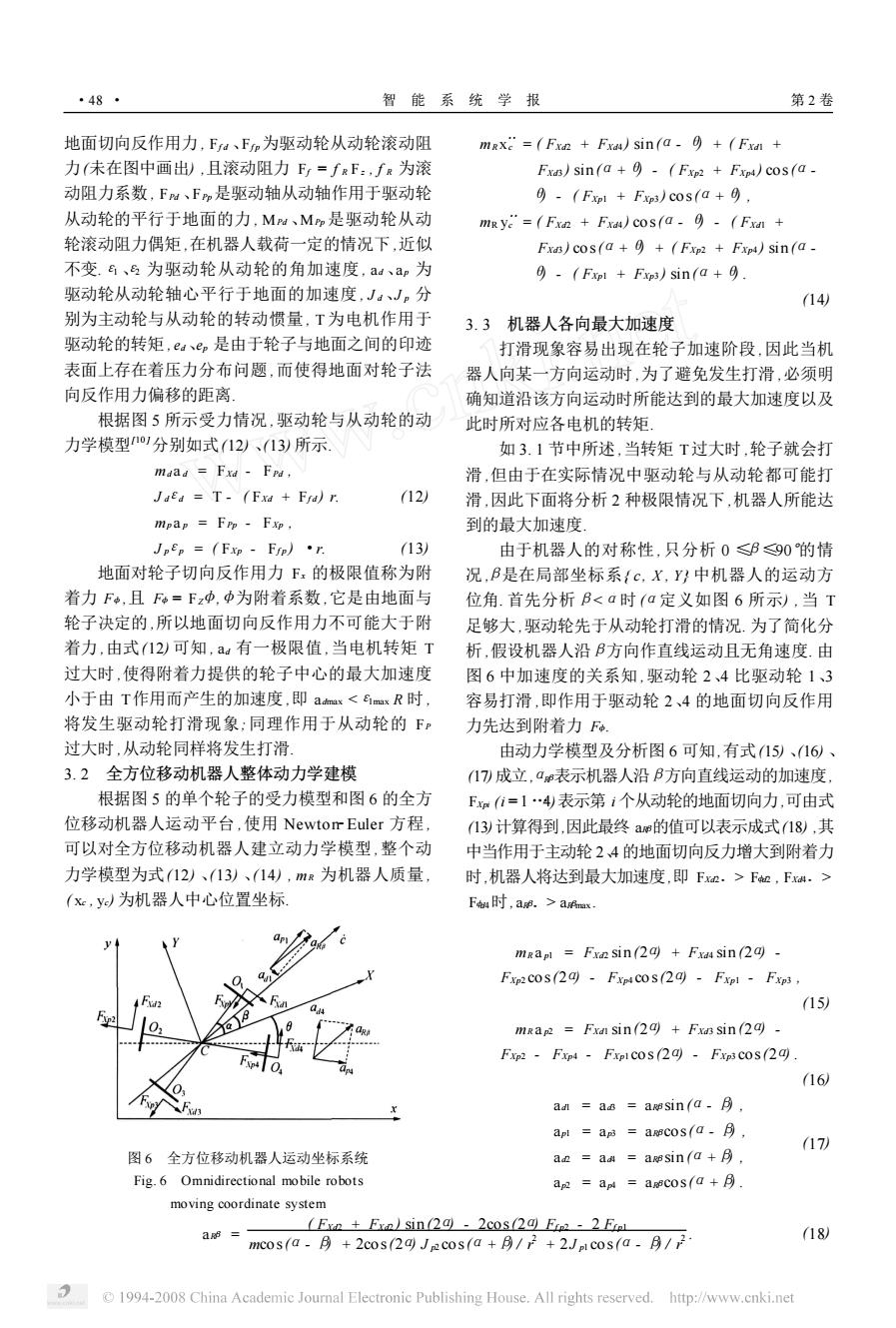
·48· 智能系统学报 第2卷 地面切向反作用力,Fa、Fn为驱动轮从动轮滚动阻 mRxc=(Fx Fxas)sin(a-0 +(Fxa 力(未在图中画出),且滚动阻力F,=fRF:,fR为滚 Fxa)sin(a+0-(Fxp2 Fxps)cos(a- 动阻力系数,FM、Fm是驱动轴从动轴作用于驱动轮 0-(Fxpl +Fxps)cos(a+0, 从动轮的平行于地面的力,Ma、M是驱动轮从动 mRye=(Fxa Fxa)cos(a-0-(Fxa 轮滚动阻力偶矩,在机器人载荷一定的情况下,近似 Fxas)cos(a++(Fxp2 Fxp)sin(a- 不变.(、6为驱动轮从动轮的角加速度,aa、ap为 0-(Fxpt Fxps)sin(a+0. 驱动轮从动轮轴心平行于地面的加速度,J:、J。分 14 别为主动轮与从动轮的转动惯量,T为电机作用于 3.3机器人各向最大加速度 驱动轮的转矩,ea、ep是由于轮子与地面之间的印迹 打滑现象容易出现在轮子加速阶段,因此当机 表面上存在着压力分布问题,而使得地面对轮子法 器人向某一方向运动时,为了避免发生打滑,必须明 向反作用力偏移的距离, 确知道沿该方向运动时所能达到的最大加速度以及 根据图5所示受力情况,驱动轮与从动轮的动 此时所对应各电机的转矩, 力学模型1分别如式12)、(13)所示。 如3.1节中所述,当转矩T过大时,轮子就会打 maad Fxd-Fpd, 滑,但由于在实际情况中驱动轮与从动轮都可能打 JaEd T-(Fxa Frd)r. 12) 滑,因此下面将分析2种极限情况下,机器人所能达 mpap Frp-Fxp, 到的最大加速度 Jpep=(Fxp-Fp)·r (13) 由于机器人的对称性,只分析0≤B90的情 地面对轮子切向反作用力F:的极限值称为附 况,B是在局部坐标系/c,X,Y}中机器人的运动方 着力F,且F=Fz中,中为附着系数,它是由地面与 位角.首先分析B<a时(a定义如图6所示),当T 轮子决定的,所以地面切向反作用力不可能大于附 足够大,驱动轮先于从动轮打滑的情况.为了简化分 着力,由式12)可知,aa有一极限值,当电机转矩T 析,假设机器人沿B方向作直线运动且无角速度.由 过大时,使得附着力提供的轮子中心的最大加速度 图6中加速度的关系知,驱动轮2、4比驱动轮1、3 小于由T作用而产生的加速度,即aax<mxR时, 容易打滑,即作用于驱动轮2、4的地面切向反作用 将发生驱动轮打滑现象:同理作用于从动轮的F· 力先达到附着力F 过大时,从动轮同样将发生打滑 由动力学模型及分析图6可知,有式(15)、16、 3.2全方位移动机器人整体动力学建模 (17)成立,¤表示机器人沿B方向直线运动的加速度, 根据图5的单个轮子的受力模型和图6的全方 F(i=14表示第i个从动轮的地面切向力,可由式 位移动机器人运动平台,使用Newtom Euler方程, 13)计算得到,因此最终a的值可以表示成式18),其 可以对全方位移动机器人建立动力学模型,整个动 中当作用于主动轮24的地面切向反力增大到附着力 力学模型为式12)、(13)、(14),mR为机器人质量, 时,机器人将达到最大加速度,即Fxn.>F如,Fx4.> (x,y为机器人中心位置坐标 Ff时,aB.>aax mRapl Fxa sin(2a)Fxas sin(2a)- Fxp2coS(2)-Fxpcos(2a)-Fxpl-Fxp3, (15) mRap Fxa sin(20)Fxas sin(2a)- Fxp2-Fxp4-Fxpi c0s2四-Fxps COS(2四 (16) aa=ad=aesin(a-月, apt=ap3=aRCOS(a.月, 17) 图6全方位移动机器人运动坐标系统 aa=aw=aesin(a+月, Fig.6 Omnidirectional mobile robots ap=aA=acos(a+月 moving coordinate system (Ere Exa)sin(2a)-2cos(2a Etn2-2 Fcl a时= mc0s(a-月+2cos(2gJ2c0s1a+月/2+2 Jpicos(a-月/2 (18) 1994-2008 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net地面切向反作用力 , Ff d 、Ff p为驱动轮从动轮滚动阻 力(未在图中画出) ,且滚动阻力 Ff = f R Fz , f R 为滚 动阻力系数 , F Pd 、F Pp是驱动轴从动轴作用于驱动轮 从动轮的平行于地面的力 , MPd 、MPp 是驱动轮从动 轮滚动阻力偶矩 ,在机器人载荷一定的情况下 ,近似 不变.ε1 、ε2 为驱动轮从动轮的角加速度 , a d 、a p 为 驱动轮从动轮轴心平行于地面的加速度 , J d 、J p 分 别为主动轮与从动轮的转动惯量 , T 为电机作用于 驱动轮的转矩 , ed 、ep 是由于轮子与地面之间的印迹 表面上存在着压力分布问题 ,而使得地面对轮子法 向反作用力偏移的距离. 根据图 5 所示受力情况 ,驱动轮与从动轮的动 力学模型[10 ]分别如式(12) 、(13) 所示. md a d = FXd - F Pd , J dεd = T - ( FXd + Ff d ) r. (12) mp a p = F Pp - FXp , J pεp = ( FXp - Ff p ) ·r. (13) 地面对轮子切向反作用力 Fx 的极限值称为附 着力 Fφ ,且 Fφ = FZφ,φ为附着系数 ,它是由地面与 轮子决定的 ,所以地面切向反作用力不可能大于附 着力 ,由式(12) 可知 , a d 有一极限值 ,当电机转矩 T 过大时 ,使得附着力提供的轮子中心的最大加速度 小于由 T作用而产生的加速度 ,即 a dmax <ε1max R 时 , 将发生驱动轮打滑现象;同理作用于从动轮的 F P 过大时 ,从动轮同样将发生打滑. 3. 2 全方位移动机器人整体动力学建模 根据图 5 的单个轮子的受力模型和图 6 的全方 位移动机器人运动平台 ,使用 Newton2Euler 方程 , 可以对全方位移动机器人建立动力学模型 ,整个动 力学模型为式(12) 、(13) 、(14) , mR 为机器人质量 , ( xc , yc ) 为机器人中心位置坐标. 图 6 全方位移动机器人运动坐标系统 Fig. 6 Omnidirectional mobile robots moving coordinate system mR x¨c = ( FXd2 + FXd4 ) sin (α- θ) + ( FXd1 + FXd3 ) sin (α+θ) - ( FXp2 + FXp4 ) cos(α- θ) - ( FXp1 + FXp3 ) cos(α+θ) , mR y¨c = ( FXd2 + FXd4 ) cos(α- θ) - ( FXd1 + FXd3 ) cos(α+θ) + ( FXp2 + FXp4 ) sin (α- θ) - ( FXp1 + FXp3 ) sin (α+θ) . (14) 3. 3 机器人各向最大加速度 打滑现象容易出现在轮子加速阶段 ,因此当机 器人向某一方向运动时 ,为了避免发生打滑 ,必须明 确知道沿该方向运动时所能达到的最大加速度以及 此时所对应各电机的转矩. 如 3. 1 节中所述 ,当转矩 T过大时 ,轮子就会打 滑 ,但由于在实际情况中驱动轮与从动轮都可能打 滑 ,因此下面将分析 2 种极限情况下 ,机器人所能达 到的最大加速度. 由于机器人的对称性 ,只分析 0 ≤β≤90°的情 况 ,β是在局部坐标系{ c , X , Y} 中机器人的运动方 位角. 首先分析β<α时 (α定义如图 6 所示) ,当 T 足够大 ,驱动轮先于从动轮打滑的情况. 为了简化分 析 ,假设机器人沿β方向作直线运动且无角速度. 由 图 6 中加速度的关系知 ,驱动轮 2、4 比驱动轮 1、3 容易打滑 ,即作用于驱动轮 2、4 的地面切向反作用 力先达到附着力 Fφ. 由动力学模型及分析图 6 可知,有式(15) 、(16) 、 (17)成立,αRβ表示机器人沿β方向直线运动的加速度, FXpi (i = 1 …4)表示第 i 个从动轮的地面切向力,可由式 (13)计算得到,因此最终 aRβ的值可以表示成式(18) ,其 中当作用于主动轮 2、4 的地面切向反力增大到附着力 时,机器人将达到最大加速度,即 FXd2 - > Fφd2 , FXd4 - > Fφd4时, aRβ- > aRβmax . mR a p1 = FXd2 sin (2α) + FXd4 sin (2α) - FXp2 cos(2α) - FXp4 co s(2α) - FXp1 - FXp3 , (15) mR a p2 = FXd1 sin (2α) + FXd3 sin (2α) - FXp2 - FXp4 - FXp1 cos(2α) - FXp3 cos(2α) . (16) a d1 = a d3 = aRβsin (α- β) , a p1 = a p3 = aRβcos(α- β) , a d2 = a d4 = aRβsin (α+β) , a p2 = a p4 = aRβcos(α+β) . (17) a Rβ = ( FXd2 + FXd2 ) sin (2α) - 2cos(2α) Ff p2 - 2 Ff p1 mcos(α- β) + 2cos(2α) J p2 cos(α+β) / r 2 + 2J p1 cos(α- β) / r 2 . (18) · 84 · 智 能 系 统 学 报 第 2 卷