正在加载图片...
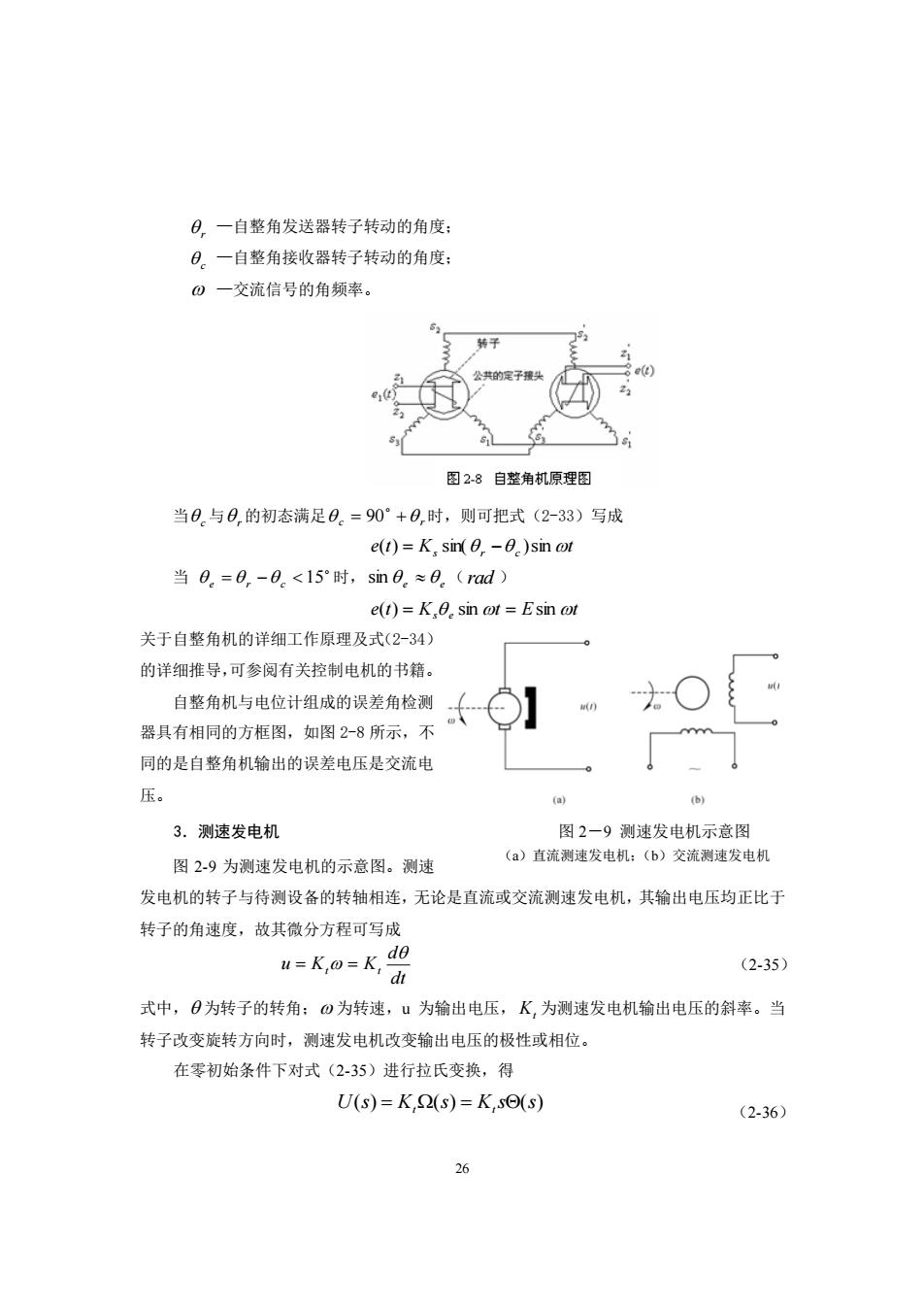
日,一自整角发送器转子转动的角度: 日。一自整角接收器转子转动的角度 0一交流信号的角频率。 子 图28自整角机原理图 当0。与0的初态满足0。=90°+0,时,则可把式(2-33)写成 e(t)=K.sin 0-0)sin oot 当0.=0,-0。<15°时,sin8.≈6。(rad) e(t)=K.0.sm ot Esin ot 关于自整角机的详细工作原理及式(234) 的详细推导,可参阅有关控制电机的书籍。 自整角机与电位计组成的误差角检测 器具有相同的方框图,如图2-8所示,不 同的是自整角机输出的误差电压是交流电 压。 a 3.测速发电机 图2一9测速发电机示意图 图2-9为测速发电机的示意图。测速 (a)直流测速发电机:(b)交流测速发电机 发电机的转子与待测设备的转轴相连,无论是直流或交流测速发电机,其输出电压均正比于 转子的角速度,故其微分方程可写成 I=Ko=水9 (2-35) 式中,O为转子的转角:0为转速,u为输出电压,K,为测速发电机输出电压的斜率。当 转子改变旋转方向时,测速发电机改变输出电压的极性或相位。 在零初始条件下对式(2-35)进行拉氏变换,得 U(s)=K,(s)=K,se(s) (2-36) 26 r —自整角发送器转子转动的角度; c —自整角接收器转子转动的角度; —交流信号的角频率。 当 c 与 r 的初态满足 c = + r 90 时,则可把式(2-33)写成 e t K t ( ) = s sin( r − c )sin 当 e = r − c 15 时, e e sin ( rad ) e t K t E t ( ) = s e sin = sin 关于自整角机的详细工作原理及式(2-34) 的详细推导,可参阅有关控制电机的书籍。 自整角机与电位计组成的误差角检测 器具有相同的方框图,如图 2-8 所示,不 同的是自整角机输出的误差电压是交流电 压。 3.测速发电机 图 2-9 为测速发电机的示意图。测速 发电机的转子与待测设备的转轴相连,无论是直流或交流测速发电机,其输出电压均正比于 转子的角速度,故其微分方程可写成 dt d u Kt Kt = = (2-35) 式中, 为转子的转角; 为转速,u 为输出电压, Kt 为测速发电机输出电压的斜率。当 转子改变旋转方向时,测速发电机改变输出电压的极性或相位。 在零初始条件下对式(2-35)进行拉氏变换,得 U(s) K (s) K s (s) = t = t (2-36) 图 2-9 测速发电机示意图 (a)直流测速发电机;(b)交流测速发电机