正在加载图片...
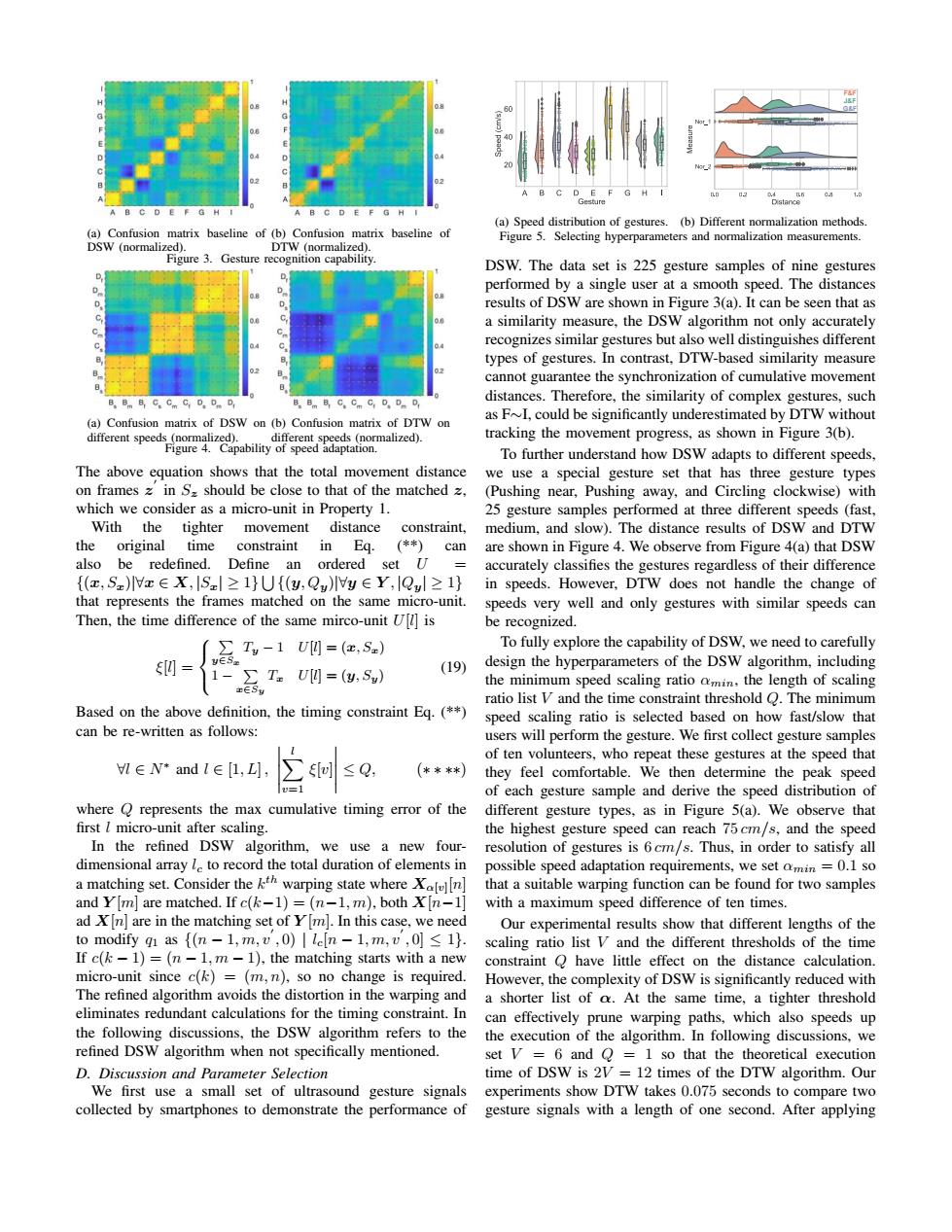
F 52 A BC O E F G H I A B C D E F G H (a)Speed distribution of gestures.(b)Different normalization methods. (a)Confusion matrix baseline of(b)Confusion matrix baseline of Figure 5.Selecting hyperparameters and normalization measurements. DSW (normalized). DTW (normalized). Figure 3.Gesture recognition capability DSW.The data set is 225 gesture samples of nine gestures performed by a single user at a smooth speed.The distances results of DSW are shown in Figure 3(a).It can be seen that as a similarity measure,the DSW algorithm not only accurately recognizes similar gestures but also well distinguishes different types of gestures.In contrast,DTW-based similarity measure 52 cannot guarantee the synchronization of cumulative movement distances.Therefore,the similarity of complex gestures,such (a)Confusion matrix of DSW on (b)Confusion matrix of DTW on as FI,could be significantly underestimated by DTW without different speeds (normalized). different speeds(normalized). tracking the movement progress,as shown in Figure 3(b). Figure 4.Capability of speed adaptation. To further understand how DSW adapts to different speeds, The above equation shows that the total movement distance we use a special gesture set that has three gesture types on frames z in S=should be close to that of the matched z, (Pushing near,Pushing away,and Circling clockwise)with which we consider as a micro-unit in Property 1. 25 gesture samples performed at three different speeds(fast, With the tighter movement distance constraint, medium,and slow).The distance results of DSW and DTW the original time constraint in Eq. (**can are shown in Figure 4.We observe from Figure 4(a)that DSW also be redefined. Define an ordered set U accurately classifies the gestures regardless of their difference {(x,Sz)x∈X,lSzl≥1}U{(y,Qy)y∈Y,IQl≥1} in speeds.However,DTW does not handle the change of that represents the frames matched on the same micro-unit. speeds very well and only gestures with similar speeds can Then,the time difference of the same mirco-unit U]is be recognized. T-1 U=(a,S) To fully explore the capability of DSW,we need to carefully yES 1-∑T.U[g=(y,S) (19) design the hyperparameters of the DSW algorithm,including the minimum speed scaling ratio amin,the length of scaling ESy ratio list V and the time constraint threshold Q.The minimum Based on the above definition,the timing constraint Eq.(** speed scaling ratio is selected based on how fast/slow that can be re-written as follows: users will perform the gesture.We first collect gesture samples of ten volunteers,who repeat these gestures at the speed that ∀leN*andl∈[1,L (****) they feel comfortable.We then determine the peak speed of each gesture sample and derive the speed distribution of where Q represents the max cumulative timing error of the different gesture types,as in Figure 5(a).We observe that first l micro-unit after scaling the highest gesture speed can reach 75cm/s,and the speed In the refined DSW algorithm,we use a new four- resolution of gestures is 6 cm/s.Thus,in order to satisfy all dimensional array le to record the total duration of elements in possible speed adaptation requirements,we set amin=0.1 so a matching set.Consider the kth warping state whereX that a suitable warping function can be found for two samples and Ym are matched.If c(-1)=(n-1,m),both Xn-1 with a maximum speed difference of ten times. ad Xn]are in the matching set of Y[m].In this case,we need Our experimental results show that different lengths of the to modify gi as {(n -1,m,v,0)leln-1,m,v,0]<1). scaling ratio list V and the different thresholds of the time If c(k-1)=(n-1.m-1),the matching starts with a new constraint O have little effect on the distance calculation. micro-unit since c(k)=(m,n),so no change is required. However,the complexity of DSW is significantly reduced with The refined algorithm avoids the distortion in the warping and a shorter list of a.At the same time,a tighter threshold eliminates redundant calculations for the timing constraint.In can effectively prune warping paths,which also speeds up the following discussions,the DSW algorithm refers to the the execution of the algorithm.In following discussions,we refined DSW algorithm when not specifically mentioned. set V =6 and Q=1 so that the theoretical execution D.Discussion and Parameter Selection time of DSW is 2V =12 times of the DTW algorithm.Our We first use a small set of ultrasound gesture signals experiments show DTW takes 0.075 seconds to compare two collected by smartphones to demonstrate the performance of gesture signals with a length of one second.After applying(a) Confusion matrix baseline of DSW (normalized). (b) Confusion matrix baseline of DTW (normalized). Figure 3. Gesture recognition capability. (a) Confusion matrix of DSW on different speeds (normalized). (b) Confusion matrix of DTW on different speeds (normalized). Figure 4. Capability of speed adaptation. The above equation shows that the total movement distance on frames z 0 in Sz should be close to that of the matched z, which we consider as a micro-unit in Property 1. With the tighter movement distance constraint, the original time constraint in Eq. (**) can also be redefined. Define an ordered set U = {(x, Sx)|8x 2 X, |Sx| 1} S {(y, Qy)|8y 2 Y , |Qy| 1} that represents the frames matched on the same micro-unit. Then, the time difference of the same mirco-unit U[l] is ⇠[l] = 8 < : P y2Sx Ty 1 U[l]=(x, Sx) 1 P x2Sy Tx U[l]=(y, Sy) (19) Based on the above definition, the timing constraint Eq. (**) can be re-written as follows: 8l 2 N⇤ and l 2 [1, L] , X l v=1 ⇠[v] Q, (⇤ ⇤ ⇤⇤) where Q represents the max cumulative timing error of the first l micro-unit after scaling. In the refined DSW algorithm, we use a new fourdimensional array lc to record the total duration of elements in a matching set. Consider the kth warping state where X↵[v][n] and Y [m] are matched. If c(k1) = (n1, m), both X[n1] ad X[n] are in the matching set of Y [m]. In this case, we need to modify q1 as {(n 1, m, v0 , 0) | lc[n 1, m, v0 , 0] 1}. If c(k 1) = (n 1, m 1), the matching starts with a new micro-unit since c(k)=(m, n), so no change is required. The refined algorithm avoids the distortion in the warping and eliminates redundant calculations for the timing constraint. In the following discussions, the DSW algorithm refers to the refined DSW algorithm when not specifically mentioned. D. Discussion and Parameter Selection We first use a small set of ultrasound gesture signals collected by smartphones to demonstrate the performance of (a) Speed distribution of gestures. F&F J&F G&F (b) Different normalization methods. Figure 5. Selecting hyperparameters and normalization measurements. DSW. The data set is 225 gesture samples of nine gestures performed by a single user at a smooth speed. The distances results of DSW are shown in Figure 3(a). It can be seen that as a similarity measure, the DSW algorithm not only accurately recognizes similar gestures but also well distinguishes different types of gestures. In contrast, DTW-based similarity measure cannot guarantee the synchronization of cumulative movement distances. Therefore, the similarity of complex gestures, such as F⇠I, could be significantly underestimated by DTW without tracking the movement progress, as shown in Figure 3(b). To further understand how DSW adapts to different speeds, we use a special gesture set that has three gesture types (Pushing near, Pushing away, and Circling clockwise) with 25 gesture samples performed at three different speeds (fast, medium, and slow). The distance results of DSW and DTW are shown in Figure 4. We observe from Figure 4(a) that DSW accurately classifies the gestures regardless of their difference in speeds. However, DTW does not handle the change of speeds very well and only gestures with similar speeds can be recognized. To fully explore the capability of DSW, we need to carefully design the hyperparameters of the DSW algorithm, including the minimum speed scaling ratio ↵min, the length of scaling ratio list V and the time constraint threshold Q. The minimum speed scaling ratio is selected based on how fast/slow that users will perform the gesture. We first collect gesture samples of ten volunteers, who repeat these gestures at the speed that they feel comfortable. We then determine the peak speed of each gesture sample and derive the speed distribution of different gesture types, as in Figure 5(a). We observe that the highest gesture speed can reach 75 cm/s, and the speed resolution of gestures is 6 cm/s. Thus, in order to satisfy all possible speed adaptation requirements, we set ↵min = 0.1 so that a suitable warping function can be found for two samples with a maximum speed difference of ten times. Our experimental results show that different lengths of the scaling ratio list V and the different thresholds of the time constraint Q have little effect on the distance calculation. However, the complexity of DSW is significantly reduced with a shorter list of ↵. At the same time, a tighter threshold can effectively prune warping paths, which also speeds up the execution of the algorithm. In following discussions, we set V = 6 and Q = 1 so that the theoretical execution time of DSW is 2V = 12 times of the DTW algorithm. Our experiments show DTW takes 0.075 seconds to compare two gesture signals with a length of one second. After applying