正在加载图片...
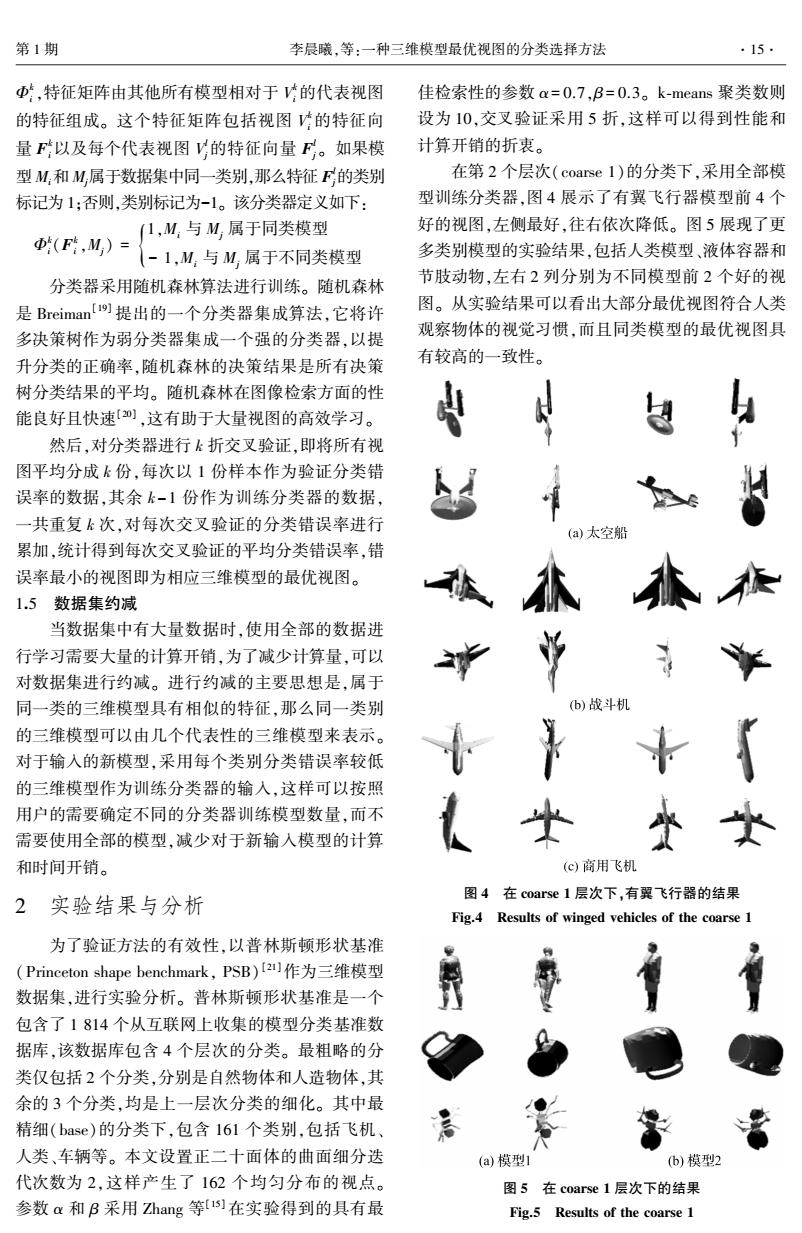
第1期 李晨曦,等:一种三维模型最优视图的分类选择方法 ·15· ,特征矩阵由其他所有模型相对于的代表视图 佳检索性的参数a=0.7,B=0.3。k-means聚类数则 的特征组成。这个特征矩阵包括视图的特征向 设为10,交叉验证采用5折,这样可以得到性能和 量F以及每个代表视图的特征向量F。如果模 计算开销的折衷。 型M:和M属于数据集中同一类别,那么特征F的类别 在第2个层次(coarse1)的分类下,采用全部模 标记为1:否则,类别标记为-1。该分类器定义如下: 型训练分类器,图4展示了有翼飞行器模型前4个 (1,M,与M,属于同类模型 好的视图,左侧最好,往右依次降低。图5展现了更 (F,M)= -1,M与M属于不同类模型 多类别模型的实验结果,包括人类模型、液体容器和 分类器采用随机森林算法进行训练。随机森林 节肢动物,左右2列分别为不同模型前2个好的视 是Breimant提出的一个分类器集成算法,它将许 图。从实验结果可以看出大部分最优视图符合人类 多决策树作为弱分类器集成一个强的分类器,以提 观察物体的视觉习惯,而且同类模型的最优视图具 升分类的正确率,随机森林的决策结果是所有决策 有较高的一致性。 树分类结果的平均。随机森林在图像检索方面的性 能良好且快速0),这有助于大量视图的高效学习。 然后,对分类器进行k折交叉验证,即将所有视 图平均分成k份,每次以1份样本作为验证分类错 误率的数据,其余k-1份作为训练分类器的数据, 一共重复k次,对每次交叉验证的分类错误率进行 (a)太空船 累加,统计得到每次交叉验证的平均分类错误率,错 误率最小的视图即为相应三维模型的最优视图。 1.5数据集约减 当数据集中有大量数据时,使用全部的数据进 行学习需要大量的计算开销,为了减少计算量,可以 对数据集进行约减。进行约减的主要思想是,属于 同一类的三维模型具有相似的特征,那么同一类别 b)战斗机 的三维模型可以由几个代表性的三维模型来表示。 对于输入的新模型,采用每个类别分类错误率较低 的三维模型作为训练分类器的输入,这样可以按照 用户的需要确定不同的分类器训练模型数量,而不 需要使用全部的模型,减少对于新输入模型的计算 和时间开销。 (c)商用飞机 图4在coarse1层次下,有翼飞行器的结果 2实验结果与分析 Fig.4 Results of winged vehicles of the coarse 1 为了验证方法的有效性,以普林斯顿形状基准 (Princeton shape benchmark,PSB)[2)作为三维模型 数据集,进行实验分析。普林斯顿形状基准是一个 包含了1814个从互联网上收集的模型分类基准数 据库,该数据库包含4个层次的分类。最粗略的分 类仅包括2个分类,分别是自然物体和人造物体,其 余的3个分类,均是上一层次分类的细化。其中最 精细(base)的分类下,包含161个类别,包括飞机、 人类、车辆等。本文设置正二十面体的曲面细分迭 (a)模型1 (b)模型2 代次数为2,这样产生了162个均匀分布的视点。 图5在coarse1层次下的结果 参数a和B采用Zhang等f1s]在实验得到的具有最 Fig.5 Results of the coarse 1Φ k i ,特征矩阵由其他所有模型相对于 V k i 的代表视图 的特征组成。 这个特征矩阵包括视图 V k i 的特征向 量 F k i 以及每个代表视图 V l j 的特征向量 F l j 。 如果模 型 Mi和 Mj属于数据集中同一类别,那么特征 F l j的类别 标记为 1;否则,类别标记为-1。 该分类器定义如下: Φ k i(F k i ,Mj) = 1,Mi 与 Mj 属于同类模型 { - 1,Mi 与 Mj 属于不同类模型 分类器采用随机森林算法进行训练。 随机森林 是 Breiman [19] 提出的一个分类器集成算法,它将许 多决策树作为弱分类器集成一个强的分类器,以提 升分类的正确率,随机森林的决策结果是所有决策 树分类结果的平均。 随机森林在图像检索方面的性 能良好且快速[20] ,这有助于大量视图的高效学习。 然后,对分类器进行 k 折交叉验证,即将所有视 图平均分成 k 份,每次以 1 份样本作为验证分类错 误率的数据,其余 k-1 份作为训练分类器的数据, 一共重复 k 次,对每次交叉验证的分类错误率进行 累加,统计得到每次交叉验证的平均分类错误率,错 误率最小的视图即为相应三维模型的最优视图。 1.5 数据集约减 当数据集中有大量数据时,使用全部的数据进 行学习需要大量的计算开销,为了减少计算量,可以 对数据集进行约减。 进行约减的主要思想是,属于 同一类的三维模型具有相似的特征,那么同一类别 的三维模型可以由几个代表性的三维模型来表示。 对于输入的新模型,采用每个类别分类错误率较低 的三维模型作为训练分类器的输入,这样可以按照 用户的需要确定不同的分类器训练模型数量,而不 需要使用全部的模型,减少对于新输入模型的计算 和时间开销。 2 实验结果与分析 为了验证方法的有效性,以普林斯顿形状基准 (Princeton shape benchmark, PSB) [21]作为三维模型 数据集,进行实验分析。 普林斯顿形状基准是一个 包含了 1 814 个从互联网上收集的模型分类基准数 据库,该数据库包含 4 个层次的分类。 最粗略的分 类仅包括 2 个分类,分别是自然物体和人造物体,其 余的 3 个分类,均是上一层次分类的细化。 其中最 精细(base)的分类下,包含 161 个类别,包括飞机、 人类、车辆等。 本文设置正二十面体的曲面细分迭 代次数为 2,这样产生了 162 个均匀分布的视点。 参数 α 和 β 采用 Zhang 等[15] 在实验得到的具有最 佳检索性的参数 α= 0.7,β = 0.3。 k⁃means 聚类数则 设为 10,交叉验证采用 5 折,这样可以得到性能和 计算开销的折衷。 在第 2 个层次(coarse 1)的分类下,采用全部模 型训练分类器,图 4 展示了有翼飞行器模型前 4 个 好的视图,左侧最好,往右依次降低。 图 5 展现了更 多类别模型的实验结果,包括人类模型、液体容器和 节肢动物,左右 2 列分别为不同模型前 2 个好的视 图。 从实验结果可以看出大部分最优视图符合人类 观察物体的视觉习惯,而且同类模型的最优视图具 有较高的一致性。 图 4 在 coarse 1 层次下,有翼飞行器的结果 Fig.4 Results of winged vehicles of the coarse 1 图 5 在 coarse 1 层次下的结果 Fig.5 Results of the coarse 1 第 1 期 李晨曦,等:一种三维模型最优视图的分类选择方法 ·15·