正在加载图片...
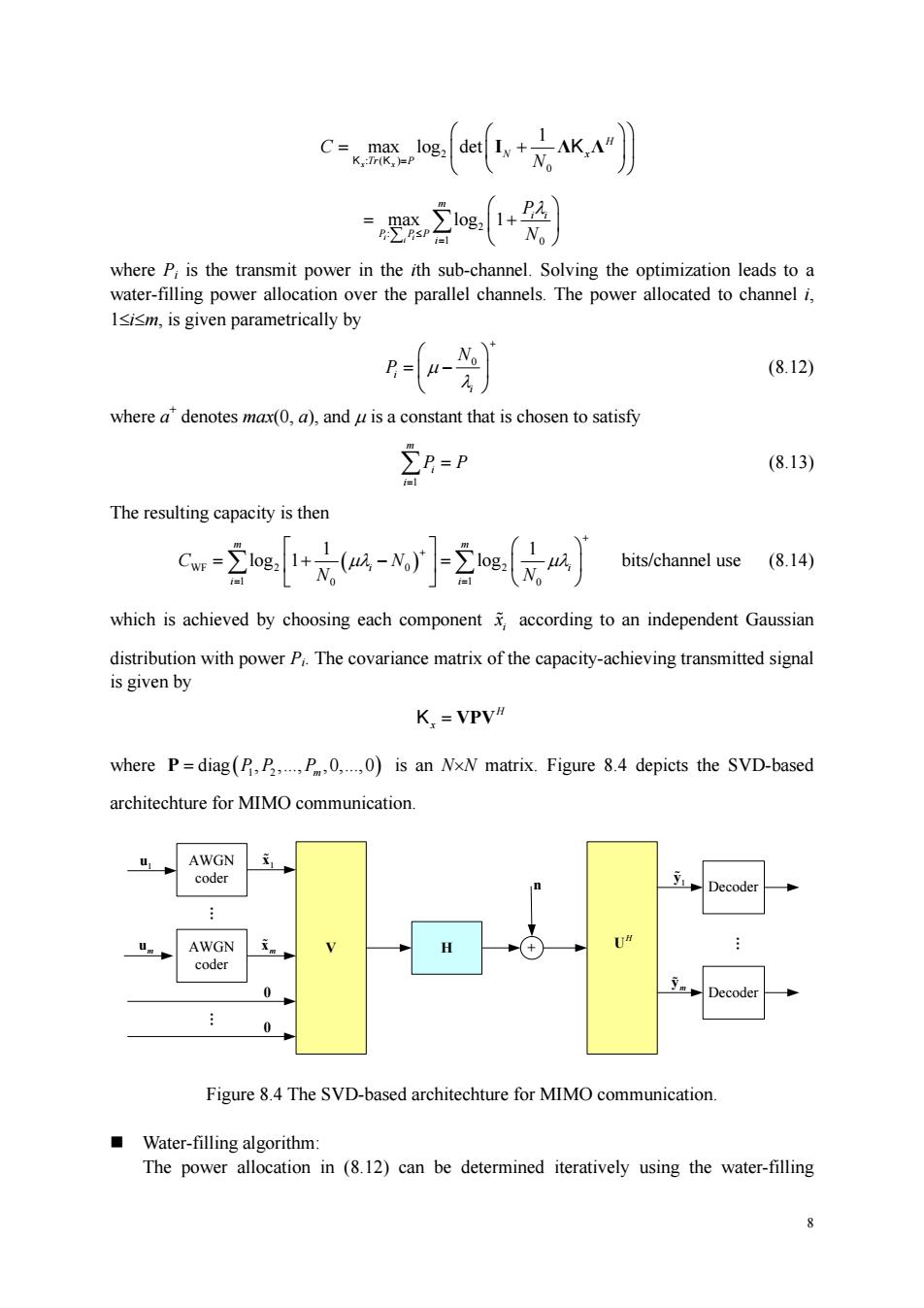
C=ea+元K,刃》 =路2e1+光) whereP is the transmit power in the th sub-channel.Solving the optimiation leads toa water-filling power allocation over the parallel channels.The power allocated to channel i. 1sism,is given parametrically by (8.12) where adenotes mx(a),and uis a constant that is chosen to satisfy En-p (8.13) The resulting capacity is then C.og.()oe. bits/channel use (8.14) which is achieved by choosing each component according to an independent Gaussian K,=VPV where P=diag(P.B.0)is an NxN matrix.Figure 8.4 depicts the SVD-based architechture for MIMO communication. coder Figure 8.4 The SVD-based architechture for MIMO communication Water-filling algorithm: The power allocation in (8.12)can be determined iteratively using the water-filling8 2 :( ) 0 1 max log det x x H N x Tr P C N I Λ Λ K K K 2 : 1 0 max log 1 i i i m i i P PP i P N where Pi is the transmit power in the ith sub-channel. Solving the optimization leads to a water-filling power allocation over the parallel channels. The power allocated to channel i, 1im, is given parametrically by 0 i i N P (8.12) where a+ denotes max(0, a), and is a constant that is chosen to satisfy 1 m i i P P (8.13) The resulting capacity is then WF 2 0 2 1 1 0 0 1 1 log 1 log m m i i i i C N N N bits/channel use (8.14) which is achieved by choosing each component i x according to an independent Gaussian distribution with power Pi. The covariance matrix of the capacity-achieving transmitted signal is given by H Kx VPV where 1 2 diag , ,., ,0,.,0 P PP Pm is an NN matrix. Figure 8.4 depicts the SVD-based architechture for MIMO communication. V + AWGN coder AWGN coder H Decoder Decoder H U um u1 1 x m x . . . 1 y m y n 0 0 Figure 8.4 The SVD-based architechture for MIMO communication. Water-filling algorithm: The power allocation in (8.12) can be determined iteratively using the water-filling