正在加载图片...
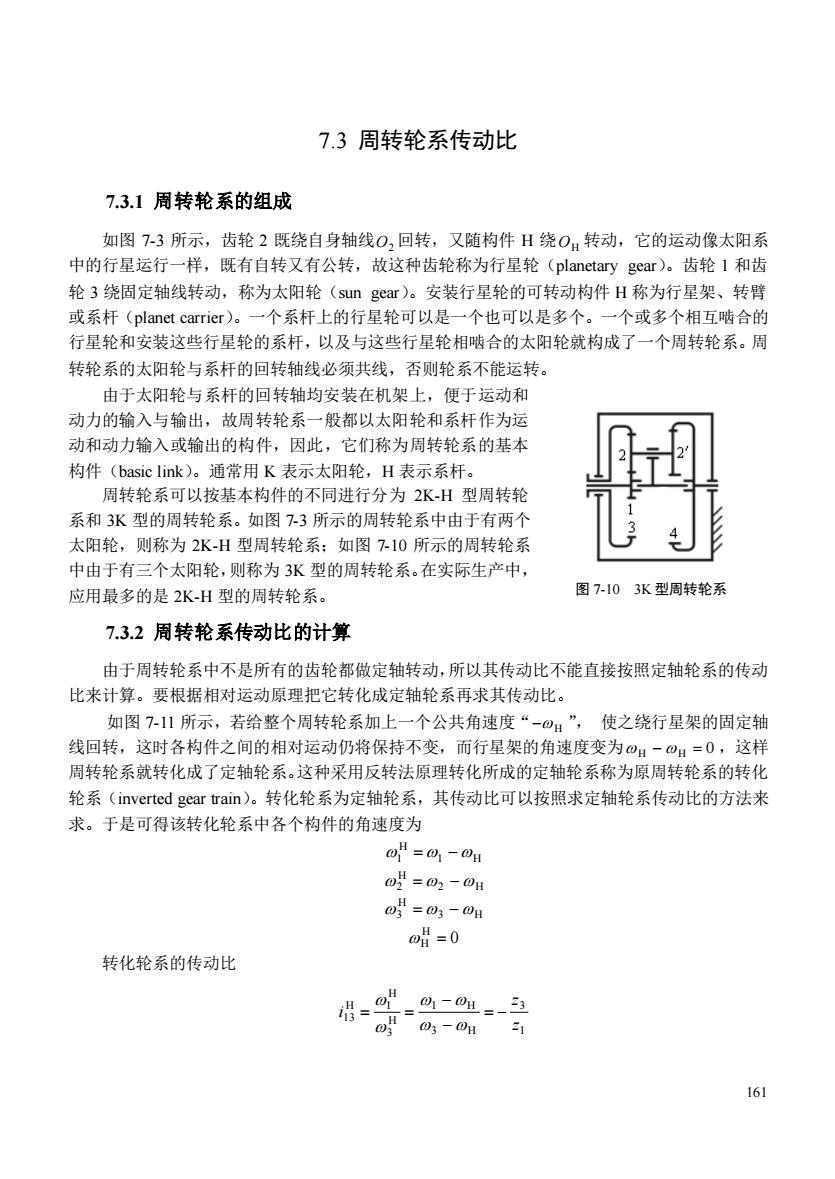
7.3周转轮系传动比 7.3.1周转轮系的组成 如图7-3所示,齿轮2既绕自身轴线O,回转,又随构件H绕0:转动,它的运动像太阳系 中的行星运行一样,既有自转又有公转,故这种齿轮称为行星轮(planetary gear)。齿轮1和齿 轮3绕固定轴线转动,称为太阳轮(sun gear)。安装行星轮的可转动构件H称为行星架、转臂 或系杆(planet carrier)。一个系杆上的行星轮可以是一个也可以是多个。一个或多个相互啮合的 行星轮和安装这些行星轮的系杆,以及与这些行星轮相啮合的太阳轮就构成了一个周转轮系。周 转轮系的太阳轮与系杆的回转轴线必须共线,否则轮系不能运转。 由于太阳轮与系杆的回转轴均安装在机架上,便于运动和 动力的输入与输出,故周转轮系一般都以太阳轮和系杆作为运 动和动力输入或输出的构件,因此,它们称为周转轮系的基本 构件(basic link)。通常用K表示太阳轮,H表示系杆。 周转轮系可以按基本构件的不同进行分为2K-H型周转轮 系和3K型的周转轮系。如图7-3所示的周转轮系中由于有两个 太阳轮,则称为2KH型周转轮系:如图7-10所示的周转轮系 中由于有三个太阳轮,则称为3K型的周转轮系。在实际生产中, 应用最多的是2K-H型的周转轮系。 图7-103K型周转轮系 7.3.2周转轮系传动比的计算 由于周转轮系中不是所有的齿轮都做定轴转动,所以其传动比不能直接按照定轴轮系的传动 比来计算。要根据相对运动原理把它转化成定轴轮系再求其传动比。 如图7-11所示,若给整个周转轮系加上一个公共角速度“-@:”,使之绕行星架的固定轴 线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度变为一=0,这样 周转轮系就转化成了定轴轮系。这种采用反转法原理转化所成的定轴轮系称为原周转轮系的转化 轮系(inverted gear train)。转化轮系为定轴轮系,其传动比可以按照求定轴轮系传动比的方法来 求。于是可得该转化轮系中各个构件的角速度为 0H =0-0u o=02-01 o5=03-04 @H =0 转化轮系的传动比 =-1=- o-ou 161 161 7.3 周转轮系传动比 7.3.1 周转轮系的组成 如图 7-3 所示,齿轮 2 既绕自身轴线 O2 回转,又随构件 H 绕 OH 转动,它的运动像太阳系 中的行星运行一样,既有自转又有公转,故这种齿轮称为行星轮(planetary gear)。齿轮 1 和齿 轮 3 绕固定轴线转动,称为太阳轮(sun gear)。安装行星轮的可转动构件 H 称为行星架、转臂 或系杆(planet carrier)。一个系杆上的行星轮可以是一个也可以是多个。一个或多个相互啮合的 行星轮和安装这些行星轮的系杆,以及与这些行星轮相啮合的太阳轮就构成了一个周转轮系。周 转轮系的太阳轮与系杆的回转轴线必须共线,否则轮系不能运转。 由于太阳轮与系杆的回转轴均安装在机架上,便于运动和 动力的输入与输出,故周转轮系一般都以太阳轮和系杆作为运 动和动力输入或输出的构件,因此,它们称为周转轮系的基本 构件(basic link)。通常用 K 表示太阳轮,H 表示系杆。 周转轮系可以按基本构件的不同进行分为 2K-H 型周转轮 系和 3K 型的周转轮系。如图 7-3 所示的周转轮系中由于有两个 太阳轮,则称为 2K-H 型周转轮系;如图 7-10 所示的周转轮系 中由于有三个太阳轮,则称为 3K 型的周转轮系。在实际生产中, 应用最多的是 2K-H 型的周转轮系。 7.3.2 周转轮系传动比的计算 由于周转轮系中不是所有的齿轮都做定轴转动,所以其传动比不能直接按照定轴轮系的传动 比来计算。要根据相对运动原理把它转化成定轴轮系再求其传动比。 如图 7-11 所示,若给整个周转轮系加上一个公共角速度“− H ”, 使之绕行星架的固定轴 线回转,这时各构件之间的相对运动仍将保持不变,而行星架的角速度变为 H − H = 0 ,这样 周转轮系就转化成了定轴轮系。这种采用反转法原理转化所成的定轴轮系称为原周转轮系的转化 轮系(inverted gear train)。转化轮系为定轴轮系,其传动比可以按照求定轴轮系传动比的方法来 求。于是可得该转化轮系中各个构件的角速度为 1 H H 1 = − 2 H H 2 = − 3 H H 3 = − 0 H H = 转化轮系的传动比 1 3 3 H 1 H H 3 H H 1 13 z z i = − − − = = 图 7-10 3K 型周转轮系