正在加载图片...
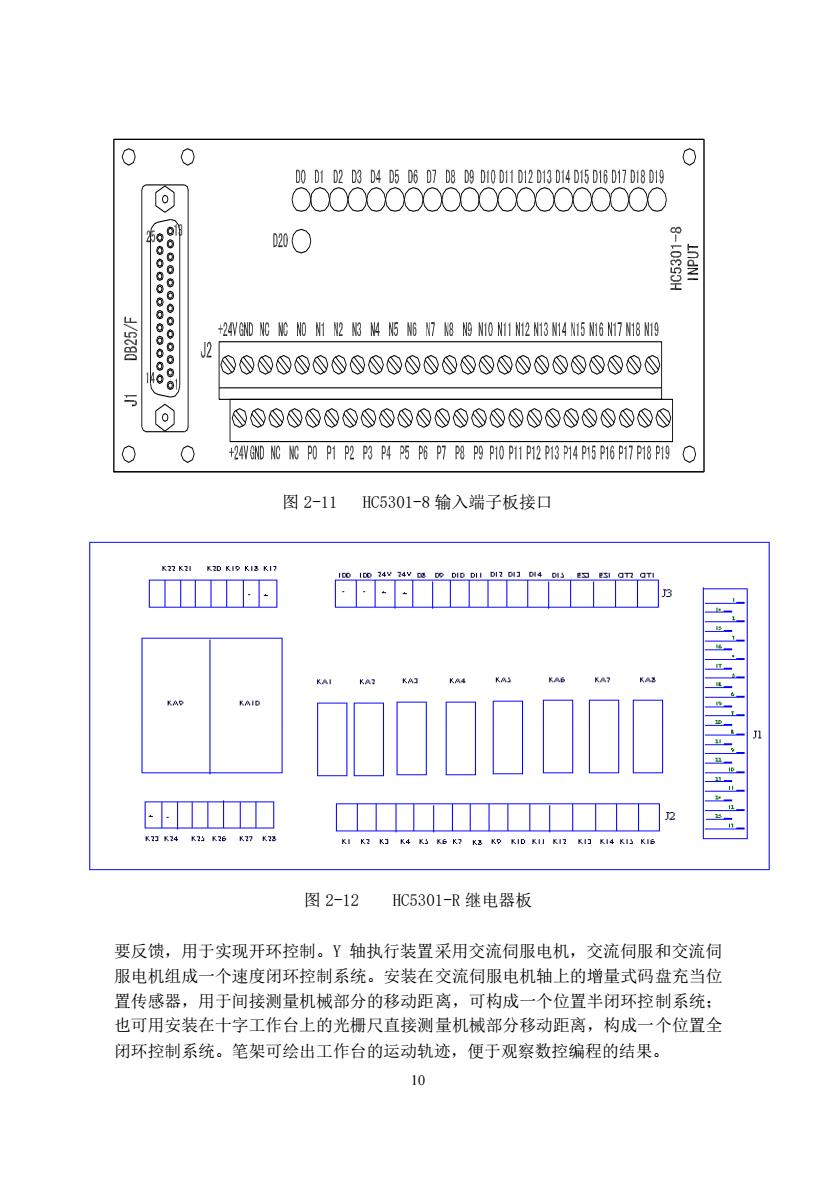
0 0 0123D45D6733i0D1D12D3D14D5Dl6D17D18Di9 ⊙ 88 120 2403粉0123米后673eN012i34N5678N9 I风四四贝I@⑨可 ⑨@贝母母9贝I⑨母四四⑨四⑨@⑨母贝 0 0 2D常黑P0PHP2P内P45 PS P7 P3P9P10PIP2P附P4P5P6PI7P8P阳O 图2-11HC5301-8输入端子板接口 K37K别K0KIpK3K E 的 4 D 7K4K3K6K77 KI K2 K3 K4 K5 K6 K2 KX KP KID KII KI2 K13 K14 K13 KI5 图2-12HC5301-R继电器板 要反馈,用于实现开环控制。Y轴执行装置采用交流伺服电机,交流伺服和交流伺 服电机组成一个速度闭环控制系统。安装在交流伺服电机轴上的增量式码盘充当位 置传感器,用于间接测量机械部分的移动距离,可构成一个位置半闭环控制系统: 也可用安装在十字工作台上的光栅尺直接测量机械部分移动距离,构成一个位置全 闭环控制系统。笔架可绘出工作台的运动轨迹,便于观察数控编程的结果。 1010 图 2-11 HC5301-8 输入端子板接口 图 2-12 HC5301-R 继电器板 要反馈,用于实现开环控制。Y 轴执行装置采用交流伺服电机,交流伺服和交流伺 服电机组成一个速度闭环控制系统。安装在交流伺服电机轴上的增量式码盘充当位 置传感器,用于间接测量机械部分的移动距离,可构成一个位置半闭环控制系统; 也可用安装在十字工作台上的光栅尺直接测量机械部分移动距离,构成一个位置全 闭环控制系统。笔架可绘出工作台的运动轨迹,便于观察数控编程的结果。 图 6 HC5301-8 输入端子板接口图