正在加载图片...
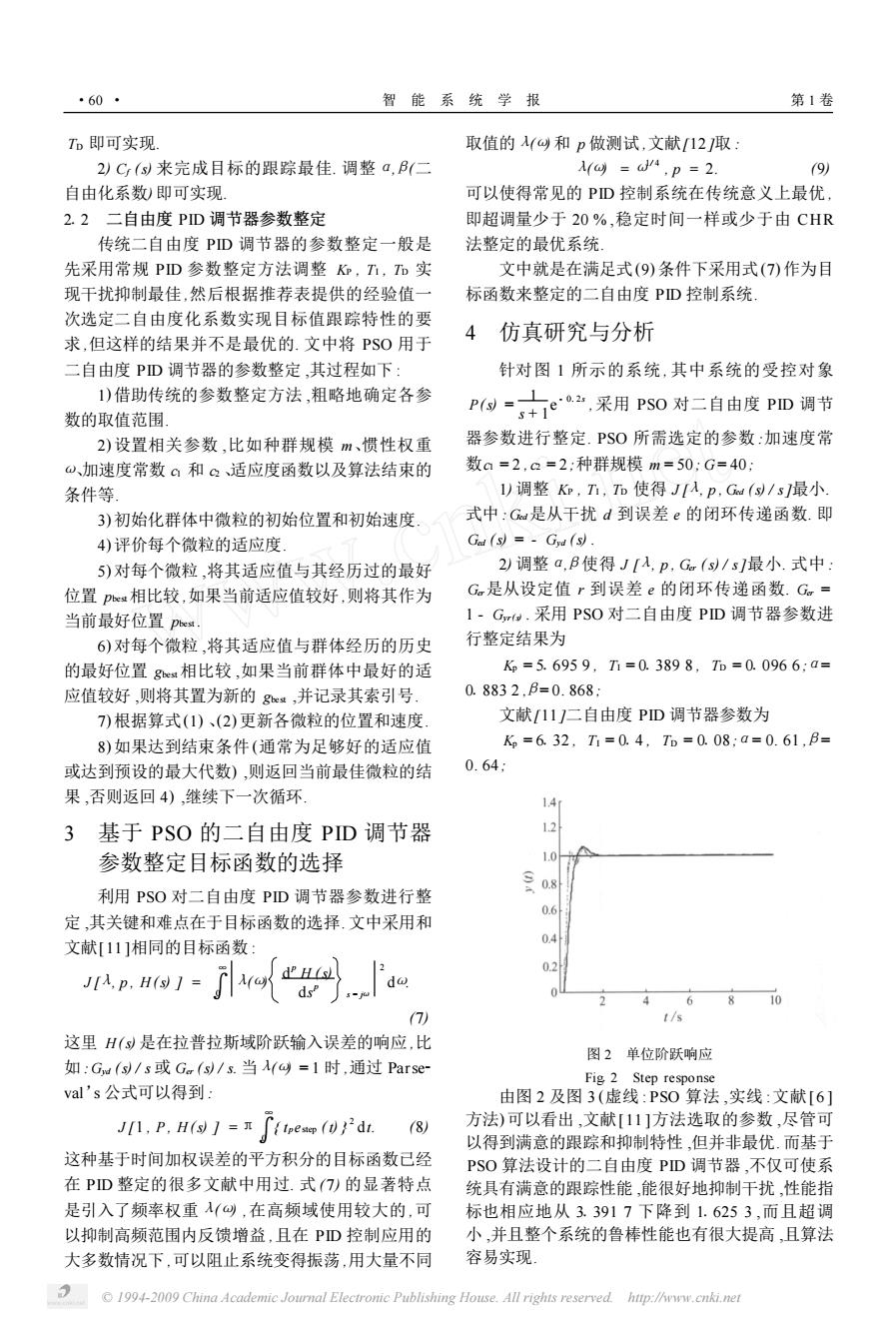
·60. 智能系统学报 第1卷 T。即可实现 取值的(,和p做测试,文献12取: 2)C(s来完成目标的跟踪最佳.调整a,B(二 A=d4,p=2 9 自由化系数)即可实现 可以使得常见的PD控制系统在传统意义上最优, 2.2二自由度PD调节器参数整定 即超调量少于20%,稳定时间一样或少于由CHR 传统二自由度PD调节器的参数整定一般是 法整定的最优系统, 先采用常规PD参数整定方法调整,1,ID实 文中就是在满足式(9)条件下采用式(7)作为目 现干扰抑制最佳,然后根据推荐表提供的经验值一 标函数来整定的二自由度PD控制系统 次选定二自由度化系数实现目标值跟踪特性的要 4 求,但这样的结果并不是最优的.文中将PS0用于 仿真研究与分析 二自由度PD调节器的参数整定,其过程如下: 针对图1所示的系统,其中系统的受控对象 1)借助传统的参数整定方法,粗略地确定各参 数的取值范围. Pg=十e2,采用PS0对二自由度PD调节 2)设置相关参数,比如种群规模m、惯性权重 器参数进行整定.PSO所需选定的参数:加速度常 ω、加速度常数和Q、适应度函数以及算法结束的 数a=2,a=2;种群规模m=50;G=40; 条件等 1)调整K,T,T使得J入p,Gm(y/s最小 3)初始化群体中微粒的初始位置和初始速度. 式中:Ga是从干扰d到误差e的闭环传递函数.即 4)评价每个微粒的适应度」 Ga(s)=-Gyd (s). 5)对每个微粒,将其适应值与其经历过的最好 2)调整a,B使得J[入,p,G()/s/最小.式中: 位置p相比较,如果当前适应值较好,则将其作为 G是从设定值r到误差e的闭环传递函数.G。= 当前最好位置pe 1-Ge.采用PSO对二自由度PD调节器参数进 6)对每个微粒,将其适应值与群体经历的历史 行整定结果为 的最好位置ge相比较,如果当前群体中最好的适 K=5.6959,T=0.3898,Tb=0.0966:a= 应值较好,则将其置为新的g,并记录其索引号. 0.8832.B=0.868: 7)根据算式(1)、(2)更新各微粒的位置和速度 文献11二自由度PD调节器参数为 8)如果达到结束条件(通常为足够好的适应值 K=6.32,T=0.4,Tn=0.08;a=0.61,B= 或达到预设的最大代数),则返回当前最佳微粒的结 0.64; 果,否则返回4),继续下一次循环 1.4 3基于PSO的二自由度PD调节器 12 参数整定日标函数的选择 1.0 利用PSO对二自由度PID调节器参数进行整 0.6 定,其关键和难点在于目标函数的选择.文中采用和 文献[11]相同的目标函数 04 0.2 J[入,p,H(y]= ds" d 6 10 7) 1/s 这里H(s是在拉普拉斯域阶跃输入误差的响应,比 图2单位阶跃响应 如:Ga(/s或G(s/s.当(=1时,通过Parse- Fig 2 Step response val's公式可以得到: 由图2及图3(虚线:PS0算法,实线:文献[6] P.H(fem(0dt. 8) 方法)可以看出,文献[11]方法选取的参数,尽管可 以得到满意的跟踪和抑制特性,但并非最优.而基于 这种基于时间加权误差的平方积分的目标函数己经 PSO算法设计的二自由度PD调节器,不仅可使系 在PD整定的很多文献中用过.式7)的显著特点 统具有满意的跟踪性能,能很好地抑制干扰,性能指 是引入了频率权重(,在高频域使用较大的,可 标也相应地从3.3917下降到1.6253,而且超调 以抑制高频范围内反馈增益,且在PD控制应用的 小,并且整个系统的鲁棒性能也有很大提高,且算法 大多数情况下,可以阻止系统变得振荡,用大量不同 容易实现 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.netTD 即可实现. 2) Cf (s) 来完成目标的跟踪最佳. 调整α,β(二 自由化系数) 即可实现. 212 二自由度 PID 调节器参数整定 传统二自由度 PID 调节器的参数整定一般是 先采用常规 PID 参数整定方法调整 KP , TI , TD 实 现干扰抑制最佳 ,然后根据推荐表提供的经验值一 次选定二自由度化系数实现目标值跟踪特性的要 求 ,但这样的结果并不是最优的. 文中将 PSO 用于 二自由度 PID 调节器的参数整定 ,其过程如下 : 1) 借助传统的参数整定方法 ,粗略地确定各参 数的取值范围. 2) 设置相关参数 ,比如种群规模 m、惯性权重 ω、加速度常数 c1 和 c2 、适应度函数以及算法结束的 条件等. 3) 初始化群体中微粒的初始位置和初始速度. 4) 评价每个微粒的适应度. 5) 对每个微粒 ,将其适应值与其经历过的最好 位置 pbest相比较 ,如果当前适应值较好 ,则将其作为 当前最好位置 pbest . 6) 对每个微粒 ,将其适应值与群体经历的历史 的最好位置 gbest 相比较 ,如果当前群体中最好的适 应值较好 ,则将其置为新的 gbest ,并记录其索引号. 7) 根据算式(1) 、(2) 更新各微粒的位置和速度. 8) 如果达到结束条件 (通常为足够好的适应值 或达到预设的最大代数) ,则返回当前最佳微粒的结 果 ,否则返回 4) ,继续下一次循环. 3 基于 PSO 的二自由度 PID 调节器 参数整定目标函数的选择 利用 PSO 对二自由度 PID 调节器参数进行整 定 ,其关键和难点在于目标函数的选择. 文中采用和 文献[ 11 ]相同的目标函数 : J [λ, p , H (s) ] =∫ ∞ 0 λ(ω) d p H (s) ds p s = jω 2 dω. (7) 这里 H (s) 是在拉普拉斯域阶跃输入误差的响应 ,比 如 : Gyd (s) / s 或 Ger (s) / s. 当λ(ω) = 1 时 ,通过 Parse2 val’s 公式可以得到 : J [1 , P , H (s) ] =π∫ ∞ 0 { t p estep ( t) } 2 dt. (8) 这种基于时间加权误差的平方积分的目标函数已经 在 PID 整定的很多文献中用过. 式 (7) 的显著特点 是引入了频率权重λ(ω) ,在高频域使用较大的 ,可 以抑制高频范围内反馈增益 ,且在 PID 控制应用的 大多数情况下 ,可以阻止系统变得振荡 ,用大量不同 取值的λ(ω) 和 p 做测试 ,文献[12 ]取 : λ(ω) = ω1/ 4 , p = 2. (9) 可以使得常见的 PID 控制系统在传统意义上最优 , 即超调量少于 20 % ,稳定时间一样或少于由 CHR 法整定的最优系统. 文中就是在满足式(9) 条件下采用式(7) 作为目 标函数来整定的二自由度 PID 控制系统. 4 仿真研究与分析 针对图 1 所示的系统 , 其中系统的受控对象 P(s) = 1 s + 1 e - 0. 2s ,采用 PSO 对二自由度 PID 调节 器参数进行整定. PSO 所需选定的参数 :加速度常 数c1 = 2 , c2 = 2 ;种群规模 m = 50 ; G = 40 ; 1) 调整 KP , TI , TD 使得 J [λ, p , Ged (s) / s]最小. 式中 : Ged是从干扰 d 到误差 e 的闭环传递函数. 即 Ged (s) = - Gyd (s) . 2) 调整α,β使得 J [λ, p , Ger (s) / s]最小. 式中 : Ger是从设定值 r 到误差 e 的闭环传递函数. Ger = 1 - Gyr(s) . 采用 PSO 对二自由度 PID 调节器参数进 行整定结果为 Kp = 51695 9 , TI = 01389 8 , TD = 01096 6 ;α= 01883 2 ,β= 0. 868 ; 文献[11 ]二自由度 PID 调节器参数为 Kp = 6132 , TI = 014 , TD = 0108 ;α= 0. 61 ,β= 0. 64 ; 图 2 单位阶跃响应 Fig12 Step response 由图 2 及图 3 (虚线 :PSO 算法 ,实线 :文献[ 6 ] 方法) 可以看出 ,文献[ 11 ]方法选取的参数 ,尽管可 以得到满意的跟踪和抑制特性 ,但并非最优. 而基于 PSO 算法设计的二自由度 PID 调节器 ,不仅可使系 统具有满意的跟踪性能 ,能很好地抑制干扰 ,性能指 标也相应地从 31391 7 下降到 11625 3 ,而且超调 小 ,并且整个系统的鲁棒性能也有很大提高 ,且算法 容易实现. ·60 · 智 能 系 统 学 报 第 1 卷 © 1994-2009 China Academic Journal Electronic Publishing House. All rights reserved. http://www.cnki.net