正在加载图片...
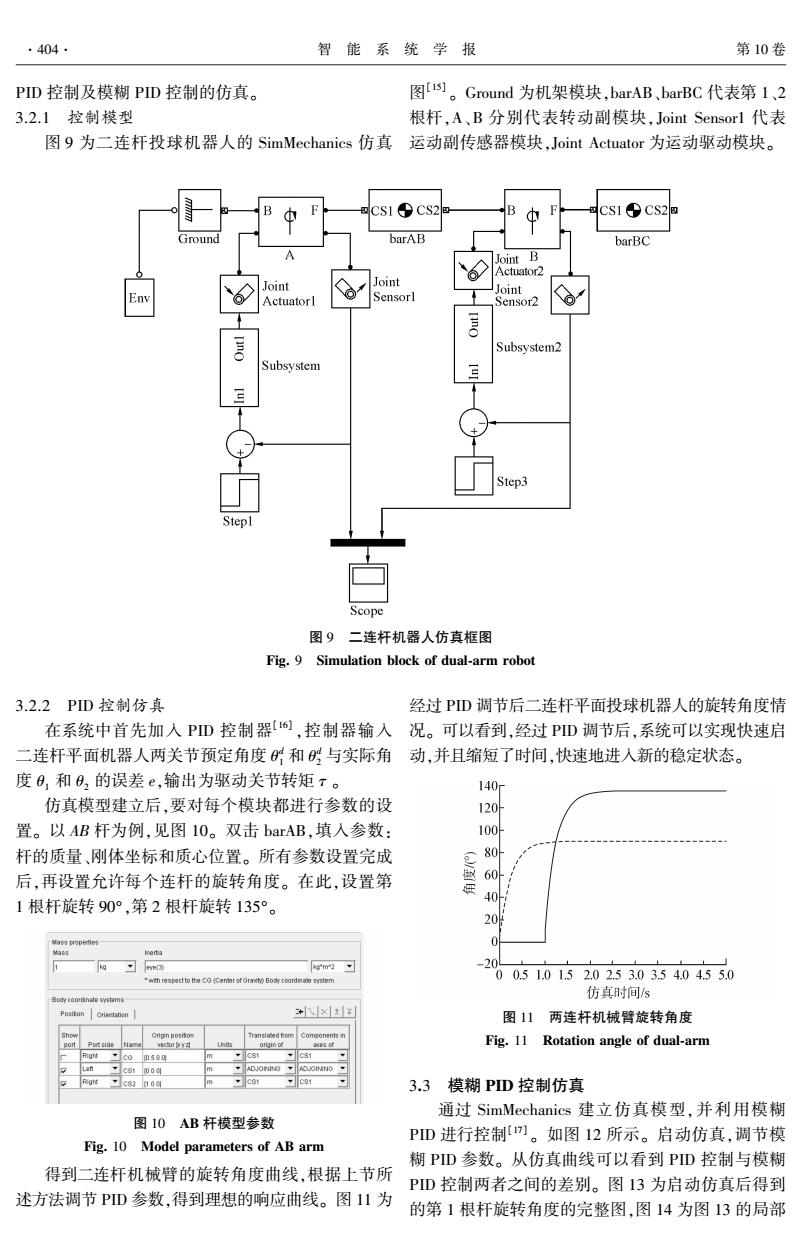
·404. 智能系统学报 第10卷 PID控制及模糊PID控制的仿真。 图s。Ground为机架模块,barAB、barBC代表第1,2 3.2.1控制模型 根杆,A、B分别代表转动副模块,Joint Sensorl代表 图9为二连杆投球机器人的SimMechanics仿真 运动副传感器模块,Joint Actuator为运动驱动模块。 CS1 CS2 CS1 CS2 Ground barAB barBC Joint B Actuator2 Joint Joint Sensorl Joint Env Actuatorl Sensor2 Subsystem2 Subsystem Step3 Step】 Scope 图9二连杆机器人仿真框图 Fig.9 Simulation block of dual-arm robot 3.2.2PID控制仿真 经过PD调节后二连杆平面投球机器人的旋转角度情 在系统中首先加入PD控制器6,控制器输入况。可以看到,经过PD调节后,系统可以实现快速启 二连杆平面机器人两关节预定角度和与实际角动,并且缩短了时间,快速地进入新的稳定状态。 度日,和0,的误差e,输出为驱动关节转矩r。 140 仿真模型建立后,要对每个模块都进行参数的设 120- 置。以AB杆为例,见图10。双击barAB,填入参数: 100 杆的质量、刚体坐标和质心位置。所有参数设置完成 后,再设置允许每个连杆的旋转角度。在此,设置第 60 1根杆旋转90°,第2根杆旋转135°。 0 grm的- -20 00.51.01.52.02.53.03.54.04.55.0 h ect to the0Ce ror的B0dn3tm dycoorsnatnstams 仿真时间s *国 图11两连杆机械臂旋转角度 Fig.11 Rotation angle of dual-arm cS2 Hoo C31 3.3模糊PD控制仿真 通过SimMechanics建立仿真模型,并利用模糊 图10AB杆模型参数 PD进行控制7)。如图12所示。启动仿真,调节模 Fig.10 Model parameters of AB arm 糊PD参数。从仿真曲线可以看到PD控制与模糊 得到二连杆机械臂的旋转角度曲线,根据上节所 PD控制两者之间的差别。图13为启动仿真后得到 述方法调节PD参数,得到理想的响应曲线。图11为 的第1根杆旋转角度的完整图,图14为图13的局部PID 控制及模糊 PID 控制的仿真。 3.2.1 控制模型 图 9 为二连杆投球机器人的 SimMechanics 仿真 图[15] 。 Ground 为机架模块,barAB、barBC 代表第 1、2 根杆,A、B 分别代表转动副模块,Joint Sensor1 代表 运动副传感器模块,Joint Actuator 为运动驱动模块。 图 9 二连杆机器人仿真框图 Fig. 9 Simulation block of dual⁃arm robot 3.2.2 PID 控制仿真 在系统中首先加入 PID 控制器[16] ,控制器输入 二连杆平面机器人两关节预定角度 θ d 1 和 θ d 2 与实际角 度 θ1 和 θ2 的误差 e,输出为驱动关节转矩 τ 。 仿真模型建立后,要对每个模块都进行参数的设 置。 以 AB 杆为例,见图 10。 双击 barAB,填入参数: 杆的质量、刚体坐标和质心位置。 所有参数设置完成 后,再设置允许每个连杆的旋转角度。 在此,设置第 1 根杆旋转 90°,第 2 根杆旋转 135°。 图 10 AB 杆模型参数 Fig. 10 Model parameters of AB arm 得到二连杆机械臂的旋转角度曲线,根据上节所 述方法调节 PID 参数,得到理想的响应曲线。 图 11 为 经过 PID 调节后二连杆平面投球机器人的旋转角度情 况。 可以看到,经过 PID 调节后,系统可以实现快速启 动,并且缩短了时间,快速地进入新的稳定状态。 图 11 两连杆机械臂旋转角度 Fig. 11 Rotation angle of dual⁃arm 3.3 模糊 PID 控制仿真 通过 SimMechanics 建立仿真模型,并利用模糊 PID 进行控制[17] 。 如图 12 所示。 启动仿真,调节模 糊 PID 参数。 从仿真曲线可以看到 PID 控制与模糊 PID 控制两者之间的差别。 图 13 为启动仿真后得到 的第 1 根杆旋转角度的完整图,图 14 为图 13 的局部 ·404· 智 能 系 统 学 报 第 10 卷