正在加载图片...
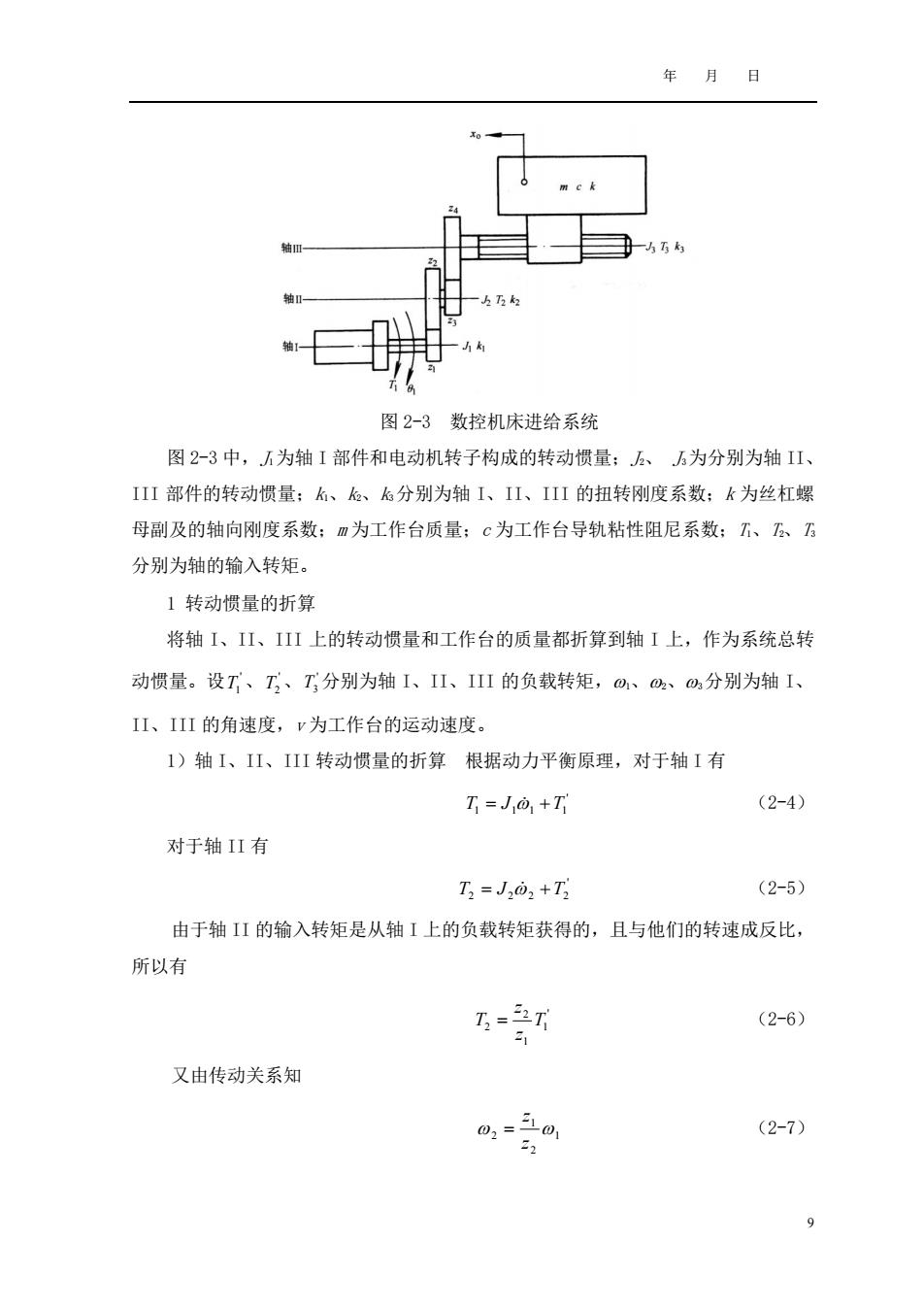
年月日 图2-3数控机床进给系统 图2-3中,为轴1部件和电动机转子构成的转动惯量:么、乃为分别为轴I1、 III部件的转动惯量:k、、飞分别为轴I、II、III的扭转刚度系数:k为丝杠螺 母副及的轴向刚度系数:m为工作台质量:c为工作台导轨粘性阻尼系数:T、、方 分别为轴的输入转矩。 1转动惯量的折算 将轴I、II、IIⅡ上的转动惯量和工作台的质量都折算到轴I上,作为系统总转 动惯量。设T、了、T分别为轴I、I1、II1的负载转矩,、、分别为轴I、 II、III的角速度,v为工作台的运动速度。 1)轴1、I1、I1转动惯量的折算根据动力平衡原理,对于轴I有 T=J0+T (2-4) 对于轴I1有 T2=J2@+T (2-5) 由于轴1的输入转矩是从轴I上的负载转矩获得的,且与他们的转速成反比, 所以有 1=2T (2-6) 又由传动关系知 (2-7)年 月 日 9 图 2-3 数控机床进给系统 图 2-3 中,J1为轴 I 部件和电动机转子构成的转动惯量;J2、 J3为分别为轴 II、 III 部件的转动惯量;k1、k2、k3分别为轴 I、II、III 的扭转刚度系数;k 为丝杠螺 母副及的轴向刚度系数;m 为工作台质量;c 为工作台导轨粘性阻尼系数;T1、T2、T3 分别为轴的输入转矩。 1 转动惯量的折算 将轴 I、II、III 上的转动惯量和工作台的质量都折算到轴 I 上,作为系统总转 动惯量。设 ' T1 、 ' T2、 ' T3 分别为轴 I、II、III 的负载转矩,1、2、3分别为轴 I、 II、III 的角速度,v 为工作台的运动速度。 1)轴 I、II、III 转动惯量的折算 根据动力平衡原理,对于轴 I 有 ' 1 1 1 T1 T = J + (2-4) 对于轴 II 有 ' 2 2 2 T2 T = J + (2-5) 由于轴 II 的输入转矩是从轴 I 上的负载转矩获得的,且与他们的转速成反比, 所以有 ' 1 1 2 2 T z z T = (2-6) 又由传动关系知 1 2 1 2 z z = (2-7)