正在加载图片...
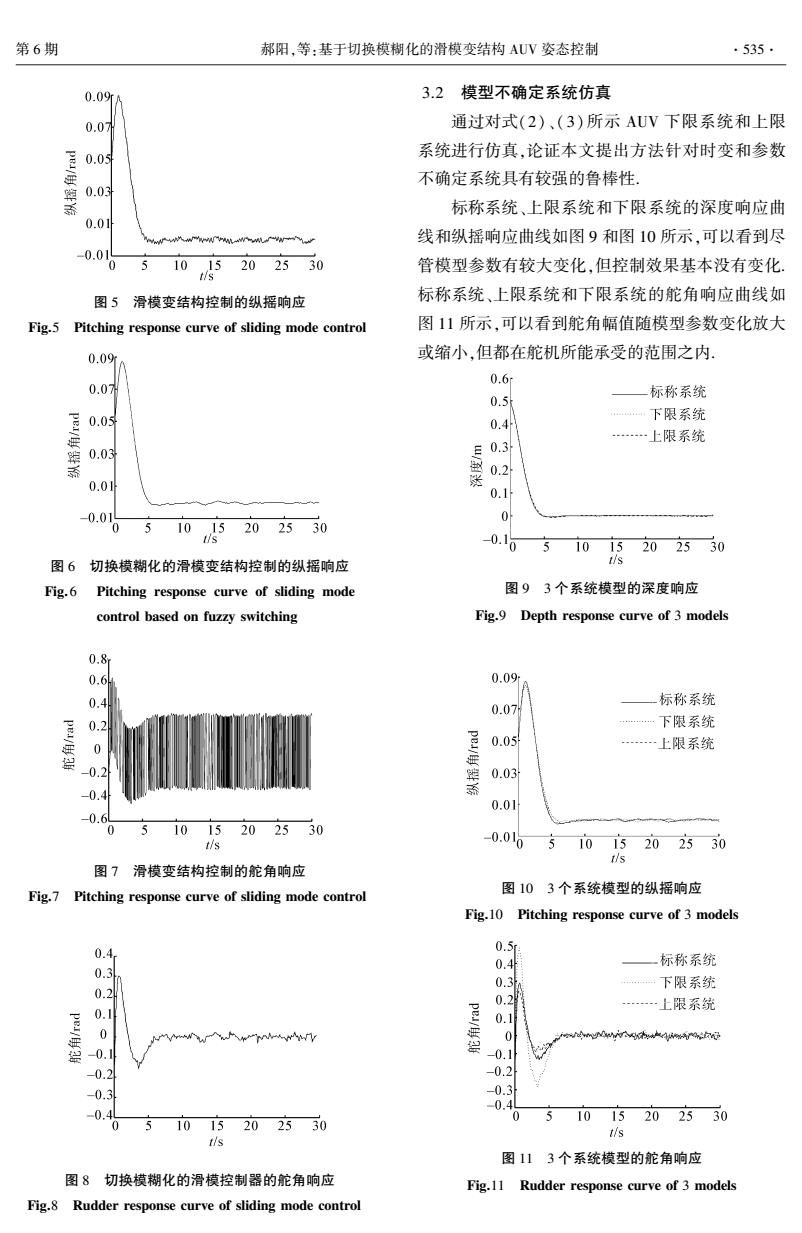
第6期 郝阳,等:基于切换模糊化的滑模变结构AUV姿态控制 .535. 0.09N 3.2模型不确定系统仿真 0.0 通过对式(2)、(3)所示AUV下限系统和上限 系统进行仿真,论证本文提出方法针对时变和参数 0.05 不确定系统具有较强的鲁棒性, 0.03 标称系统、上限系统和下限系统的深度响应曲 0.01 线和纵摇响应曲线如图9和图10所示,可以看到尽 0.0 0 5 105 202530 管模型参数有较大变化,但控制效果基本没有变化 图5滑模变结构控制的纵摇响应 标称系统、上限系统和下限系统的舵角响应曲线如 Fig.5 Pitching response curve of sliding mode control 图11所示,可以看到舵角幅值随模型参数变化放大 0.09% 或缩小,但都在舵机所能承受的范围之内。 0.6 0.07 标称系统 0.5 0.05 下限系统 0.4 …上限系统 0.03 0.2 0.0 0.1 0.01 0 0 5 1015202530 t/s 0.10 1015202530 图6切换模糊化的滑模变结构控制的纵摇响应 t/s Fig.6 Pitching response curve of sliding mode 图93个系统模型的深度响应 control based on fuzzy switching Fig.9 Depth response curve of 3 models 0.8 0.6 0.09 0.4 标称系统 0.07 0.2 下限系统 0 0.05 …上限系统 0.2 0.03 -0.4 系 0.0 -0.6 5 1015202530 t/s 0.010 1015202530 t/s 图7滑模变结构控制的舵角响应 Fig.7 Pitching response curve of sliding mode control 图103个系统模型的纵摇响应 Fig.10 Pitching response curve of 3 models 0.4 0.5r 0.4 标称系统 0.3 0.3 下限系统 0.2 0.2 …上限系统 0.1 0 0 -0.1 0.2 -0.2 -0.3 -0.3 -0.4 -0.4 0 1015202530 0 51015 202530 5 t/s tis 图113个系统模型的舵角响应 图8切换模糊化的滑模控制器的舵角响应 Fig.11 Rudder response curve of 3 models Fig.8 Rudder response curve of sliding mode control图 5 滑模变结构控制的纵摇响应 Fig.5 Pitching response curve of sliding mode control 图 6 切换模糊化的滑模变结构控制的纵摇响应 Fig. 6 Pitching response curve of sliding mode control based on fuzzy switching 图 7 滑模变结构控制的舵角响应 Fig.7 Pitching response curve of sliding mode control 图 8 切换模糊化的滑模控制器的舵角响应 Fig.8 Rudder response curve of sliding mode control 3.2 模型不确定系统仿真 通过对式(2)、(3)所示 AUV 下限系统和上限 系统进行仿真,论证本文提出方法针对时变和参数 不确定系统具有较强的鲁棒性. 标称系统、上限系统和下限系统的深度响应曲 线和纵摇响应曲线如图 9 和图 10 所示,可以看到尽 管模型参数有较大变化,但控制效果基本没有变化. 标称系统、上限系统和下限系统的舵角响应曲线如 图 11 所示,可以看到舵角幅值随模型参数变化放大 或缩小,但都在舵机所能承受的范围之内. 图 9 3 个系统模型的深度响应 Fig.9 Depth response curve of 3 models 图 10 3 个系统模型的纵摇响应 Fig.10 Pitching response curve of 3 models 图 11 3 个系统模型的舵角响应 Fig.11 Rudder response curve of 3 models 第 6 期 郝阳,等:基于切换模糊化的滑模变结构 AUV 姿态控制 ·535·