正在加载图片...
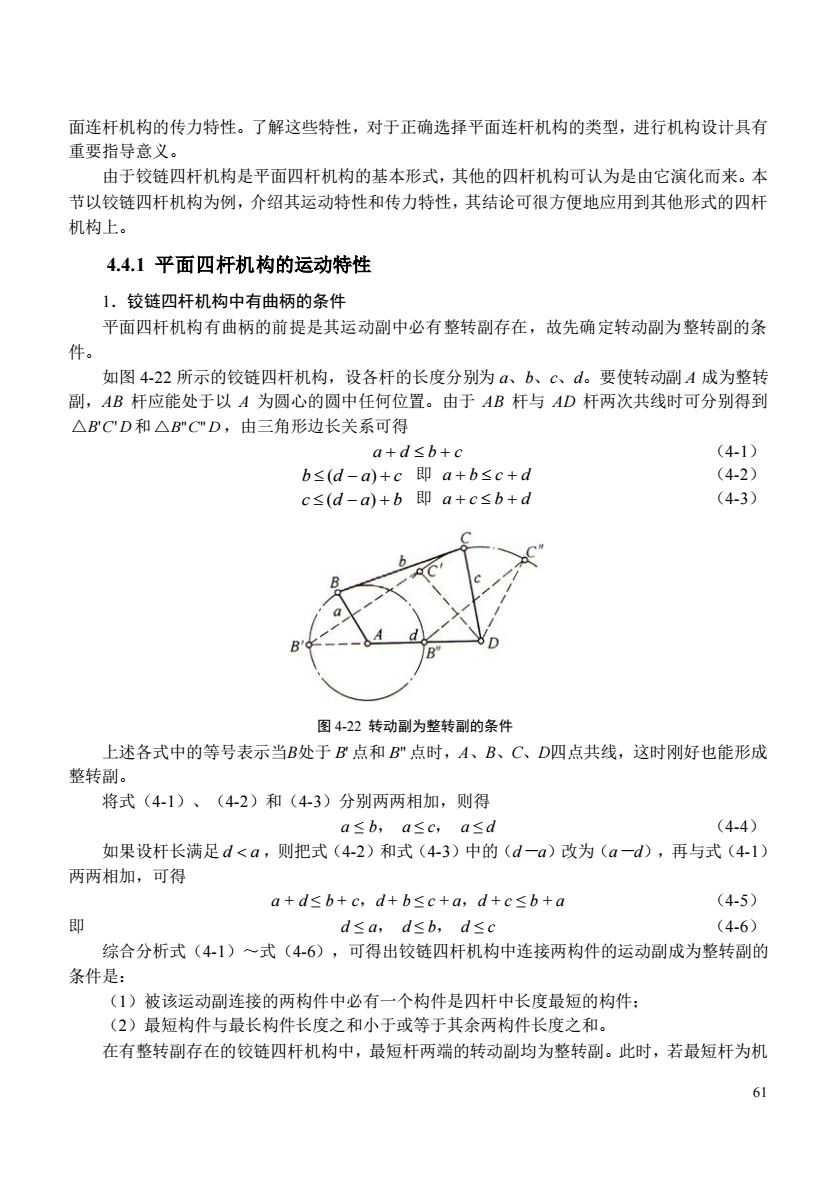
面连杆机构的传力特性。了解这些特性,对于正确选择平面连杆机构的类型,进行机构设计具有 重要指导意义。 由于铰链四杆机构是平面四杆机构的基本形式,其他的四杆机构可认为是由它演化而来。本 节以铰链四杆机构为例,介绍其运动特性和传力特性,其结论可很方便地应用到其他形式的四杆 机构上。 4.4.1平面四杆机构的运动特性 1.铰链四杆机构中有曲柄的条件 平面四杆机构有曲柄的前提是其运动副中必有整转副存在,故先确定转动副为整转副的条 冬 如图422所示的铰链四杆机构,设各杆的长度分别为、b、c、d。要使转动副A成为整转 副,AB杆应能处于以A为圆心的圆中任何位置。由于AB杆与AD杆两次共线时可分别得到 △BCD和△B"C"D,由三角形边长关系可得 a+d≤b+c (4-1) bs(d-a)+c即a+b≤c+d (4-2) c≤(d-a)+b即a+c≤b+d (4-3) 图422转动副为整转的条件 上述各式中的等号表示当B处于B点和B”点时,A、B、C、D四点共线,这时刚好也能形成 整转副。 将式(4-1)、(4-2)和(43)分别两两相加,则得 asb,asc,asd (4.4) 如果设杆长满足d<a,则把式(4-2)和式(4-3)中的(d-a)改为(a一d),再与式(4-1) 两两相加,可得 a+d≤b+C,d+b≤c+a,d+c≤b+a (4-5) dsa,dsb,dsc (4-6) 综合分析式(41)~式(4-6),可得出铰链四杆机构中连接两构件的运动副成为整转副的 条件是 (1)被该运动副连接的两构件中必有一个构件是四杆中长度最短的构件: (2)最短构件与最长构件长度之和小于或等于其余两构件长度之和。 在有整转副存在的铰链四杆机构中,最短杆两端的转动副均为整转副。此时,若最短杆为机 61 61 面连杆机构的传力特性。了解这些特性,对于正确选择平面连杆机构的类型,进行机构设计具有 重要指导意义。 由于铰链四杆机构是平面四杆机构的基本形式,其他的四杆机构可认为是由它演化而来。本 节以铰链四杆机构为例,介绍其运动特性和传力特性,其结论可很方便地应用到其他形式的四杆 机构上。 4.4.1 平面四杆机构的运动特性 1.铰链四杆机构中有曲柄的条件 平面四杆机构有曲柄的前提是其运动副中必有整转副存在,故先确定转动副为整转副的条 件。 如图 4-22 所示的铰链四杆机构,设各杆的长度分别为 a、b、c、d。要使转动副 A 成为整转 副,AB 杆应能处于以 A 为圆心的圆中任何位置。由于 AB 杆与 AD 杆两次共线时可分别得到 △B'C'D 和 △B"C"D ,由三角形边长关系可得 a + d b + c (4-1) b (d − a) + c 即 a + b c + d (4-2) c (d − a) + b 即 a + c b + d (4-3) 图 4-22 转动副为整转副的条件 上述各式中的等号表示当B处于 B' 点和 B" 点时,A、B、C、D四点共线,这时刚好也能形成 整转副。 将式(4-1)、(4-2)和(4-3)分别两两相加,则得 a ≤ b, a ≤ c, a ≤ d (4-4) 如果设杆长满足 d a ,则把式(4-2)和式(4-3)中的(d-a)改为(a-d),再与式(4-1) 两两相加,可得 a + d ≤ b + c,d + b ≤ c + a,d + c ≤ b + a (4-5) 即 d ≤ a, d ≤ b, d ≤ c (4-6) 综合分析式(4-1)~式(4-6),可得出铰链四杆机构中连接两构件的运动副成为整转副的 条件是: (1)被该运动副连接的两构件中必有一个构件是四杆中长度最短的构件; (2)最短构件与最长构件长度之和小于或等于其余两构件长度之和。 在有整转副存在的铰链四杆机构中,最短杆两端的转动副均为整转副。此时,若最短杆为机