正在加载图片...
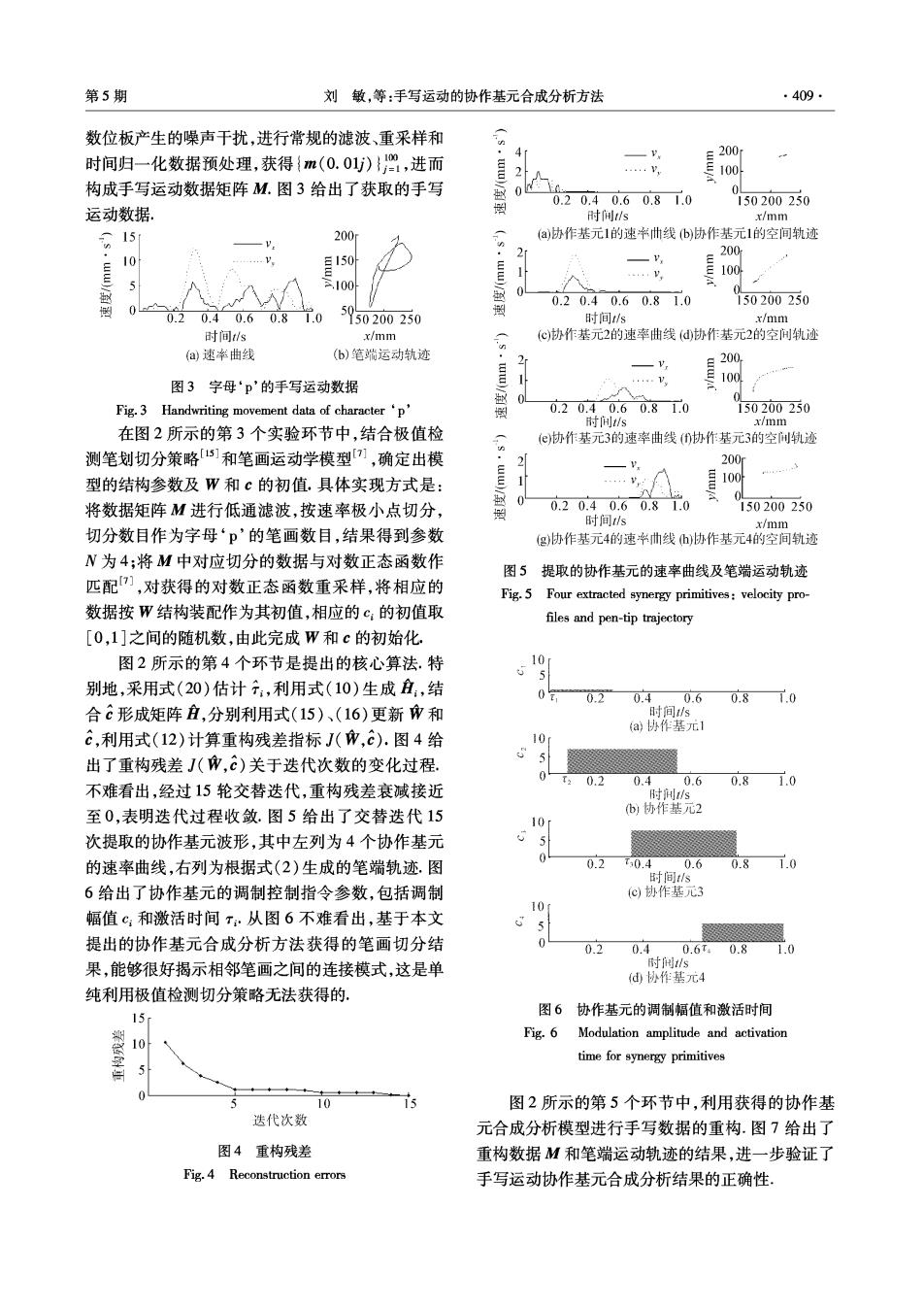
第5期 刘敏,等:手写运动的协作基元合成分析方法 ·409· 数位板产生的噪声干扰,进行常规的滤波、重采样和 时间归一化数据预处理,获得{m(0.01j),进而 4 200, 2 …vy 构成手写运动数据矩阵M.图3给出了获取的手写 具100 裂 0.20.40.60.81.0 150200250 运动数据。 时间t/s x/mm 15 200 (a)协作基元1的速卡州线(b)协作基元1的空间轨迹 E150 2 200 10 V ≥100 0 0.20.40.60.81.0 150200250 0 0.20.40.60.81.0 150200250 删 时间t/s x/mm 时间tls x/mm (c)协作基元2的速率曲线(协作基元2的空问轨迹 a)速率曲线 ()笔端运动轨迹 图3字母‘p'的手写运动数据 1 … 目微 0 Fig.3 Handwriting movement data of character'p' 綱 0.20.40.60.81.0 50200250 时间/s x/mm 在图2所示的第3个实验环节中,结合极值检 (e)协作基元3的速率曲线(0协作基元3的空问轨迹 测笔划切分策略15]和笔画运动学模型),确定出模 200 型的结构参数及W和c的初值.具体实现方式是: 写100 0 将数据矩阵M进行低通滤波,按速率极小点切分, 爱 0.20.40.60.81.0 150200250 时间t/s x/mm 切分数目作为字母‘p’的笔画数目,结果得到参数 (g)协作基元4的速兴曲线山)协作基元4的空间轨迹 N为4;将M中对应切分的数据与对数正态函数作 图5 提取的协作基元的速率曲线及笔端运动轨迹 匹配),对获得的对数正态函数重采样,将相应的 Fig.5 Four extracted synergy primitives:velocity pro- 数据按W结构装配作为其初值,相应的℃:的初值取 files and pen-tip trajectory [0,1]之间的随机数,由此完成W和c的初始化. 图2所示的第4个环节是提出的核心算法.特 10 别地,采用式(20)估计分,利用式(10)生成a,结 09 0.2 0.4 0.60.8T.0 合c形成矩阵,分别利用式(15)、(16)更新0和 时间/s a)协作基元1 c,利用式(12)计算重构残差指标J(,c).图4给 10 出了重构残差J(0,c)关于迭代次数的变化过程. T20.2 0.4 0.6 0.8 1.0 不难看出,经过15轮交替迭代,重构残差衰减接近 时间s 至0,表明迭代过程收敛.图5给出了交替迭代15 b)协作基元2 10 次提取的协作基元波形,其中左列为4个协作基元 0 的速率曲线,右列为根据式(2)生成的笔端轨迹.图 0.2 T30.4 0.6 0.8 1.0 时间/s 6给出了协作基元的调制控制指令参数,包括调制 (C)协作基元3 10 幅值℃:和激活时间T·从图6不难看出,基于本文 5 提出的协作基元合成分析方法获得的笔画切分结 0 0.2 0.4 0.6T40.8 1.0 果,能够很好揭示相邻笔画之间的连接模式,这是单 时间ls d协作基元4 纯利用极值检测切分策略无法获得的, 图6协作基元的调制幅值和激活时间 15 Fig.6 Modulation amplitude and activation 10 time for synergy primitives 10 图2所示的第5个环节中,利用获得的协作基 迭代次数 元合成分析模型进行手写数据的重构.图7给出了 图4重构残差 重构数据M和笔端运动轨迹的结果,进一步验证了 Fig.4 Reconstruction errors 手写运动协作基元合成分析结果的正确性