正在加载图片...
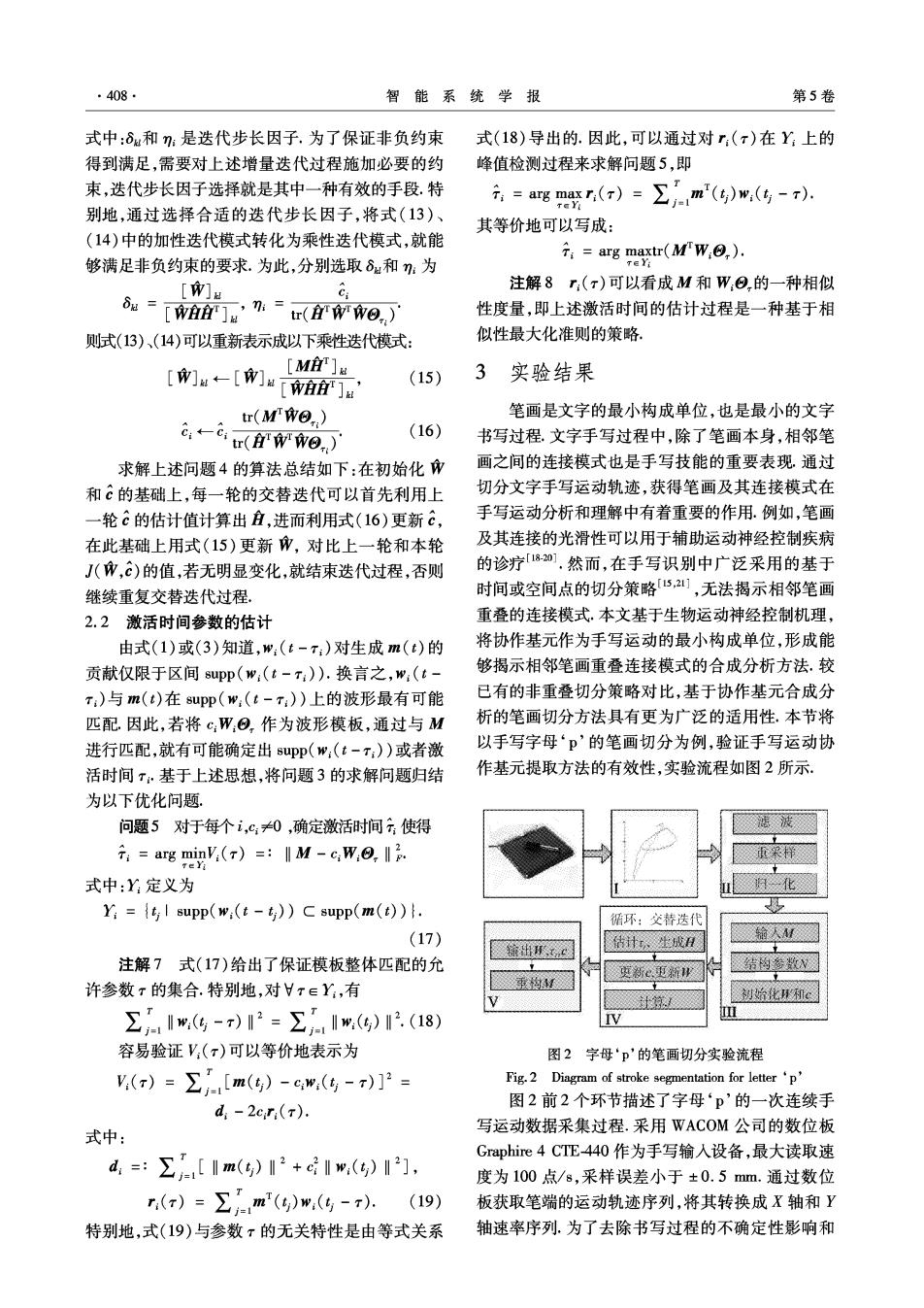
·408 智能系统学报 第5卷 式中:δu和n:是迭代步长因子.为了保证非负约束 式(18)导出的.因此,可以通过对r:(?)在Y:上的 得到满足,需要对上述增量迭代过程施加必要的约 峰值检测过程来求解问题5,即 束,迭代步长因子选择就是其中一种有效的手段.特 东=agm要r(r)=∑m(5)w,(5-). 别地,通过选择合适的迭代步长因子,将式(13)、 其等价地可以写成: (14)中的加性迭代模式转化为乘性迭代模式,就能 够满足非负约束的要求.为此,分别选取6u和?:为 arg mr(w.O.). []a c 注解8T:(r)可以看成M和W⊙,的一种相似 e=[r门g:=tr(wwo) 性度量,即上述激活时间的估计过程是一种基于相 则试(13)、(14)可以重新表示成以下乘性迭代模式: 似性最大化准则的策略。 [MA] []u←[]ai门 (15) 3实验结果 tr(Mwe.) 笔画是文字的最小构成单位,也是最小的文字 c←c tr(fwwe..) (16) 书写过程.文字手写过程中,除了笔画本身,相邻笔 求解上述问题4的算法总结如下:在初始化 画之间的连接模式也是手写技能的重要表现.通过 和c的基础上,每一轮的交替迭代可以首先利用上 切分文字手写运动轨迹,获得笔画及其连接模式在 一轮c的估计值计算出,进而利用式(16)更新c, 手写运动分析和理解中有着重要的作用.例如,笔画 在此基础上用式(15)更新,对比上一轮和本轮 及其连接的光滑性可以用于辅助运动神经控制疾病 J(0,c)的值,若无明显变化,就结束迭代过程,否则 的诊疗[801.然而,在手写识别中广泛采用的基于 继续重复交替迭代过程. 时间或空间点的切分策略52],无法揭示相邻笔画 2.2激活时间参数的估计 重叠的连接模式,本文基于生物运动神经控制机理, 由式(1)或(3)知道,w:(t-T:)对生成m(t)的 将协作基元作为手写运动的最小构成单位,形成能 贡献仅限于区间supp(w:(t-T:).换言之,w:(t- 够揭示相邻笔画重叠连接模式的合成分析方法,较 T:)与m(t)在supp(w:(t-T:))上的波形最有可能 已有的非重叠切分策略对比,基于协作基元合成分 匹配.因此,若将c:W⊙,作为波形模板,通过与M 析的笔画切分方法具有更为广泛的适用性.本节将 进行匹配,就有可能确定出supp(w:(t-T:))或者激 以手写字母‘p'的笔画切分为例,验证手写运动协 活时间T·基于上述思想,将问题3的求解问题归结 作基元提取方法的有效性,实验流程如图2所示. 为以下优化问题 问题5对于每个i,c:≠0,确定激活时间:使得 i:=arg minV:(r)=:‖M-c,W⑨,‖, 式中:Y定义为 化 Y;=t;I supp(w;(t-t;))C supp(m(t)). 循环:交替迭代 (17) 输出Fc 结计成 注解7式(17)给出了保证模板整体匹配的允 结参数 构r 新,更新 许参数r的集合.特别地,对Hr∈Y:,有 始化和c ∑w,-)2=Iw).(18) 容易验证V:()可以等价地表示为 图2字母‘p'的笔画切分实验流程 ()=[m(g)-cm,(g-1 Fig.2 Diagram of stroke segmentation for letter'p' 图2前2个环节描述了字母‘p'的一次连续手 d:-2cr(T). 写运动数据采集过程.采用WACOM公司的数位板 式中: Graphire4CTE440作为手写输人设备,最大读取速 d=:∑【m()2+clw,()I2], 度为100点/s,采样误差小于±0.5mm.通过数位 r(r)=∑m()w,(5- .(19) 板获取笔端的运动轨迹序列,将其转换成X轴和Y 特别地,式(19)与参数?的无关特性是由等式关系 轴速率序列.为了去除书写过程的不确定性影响和