正在加载图片...
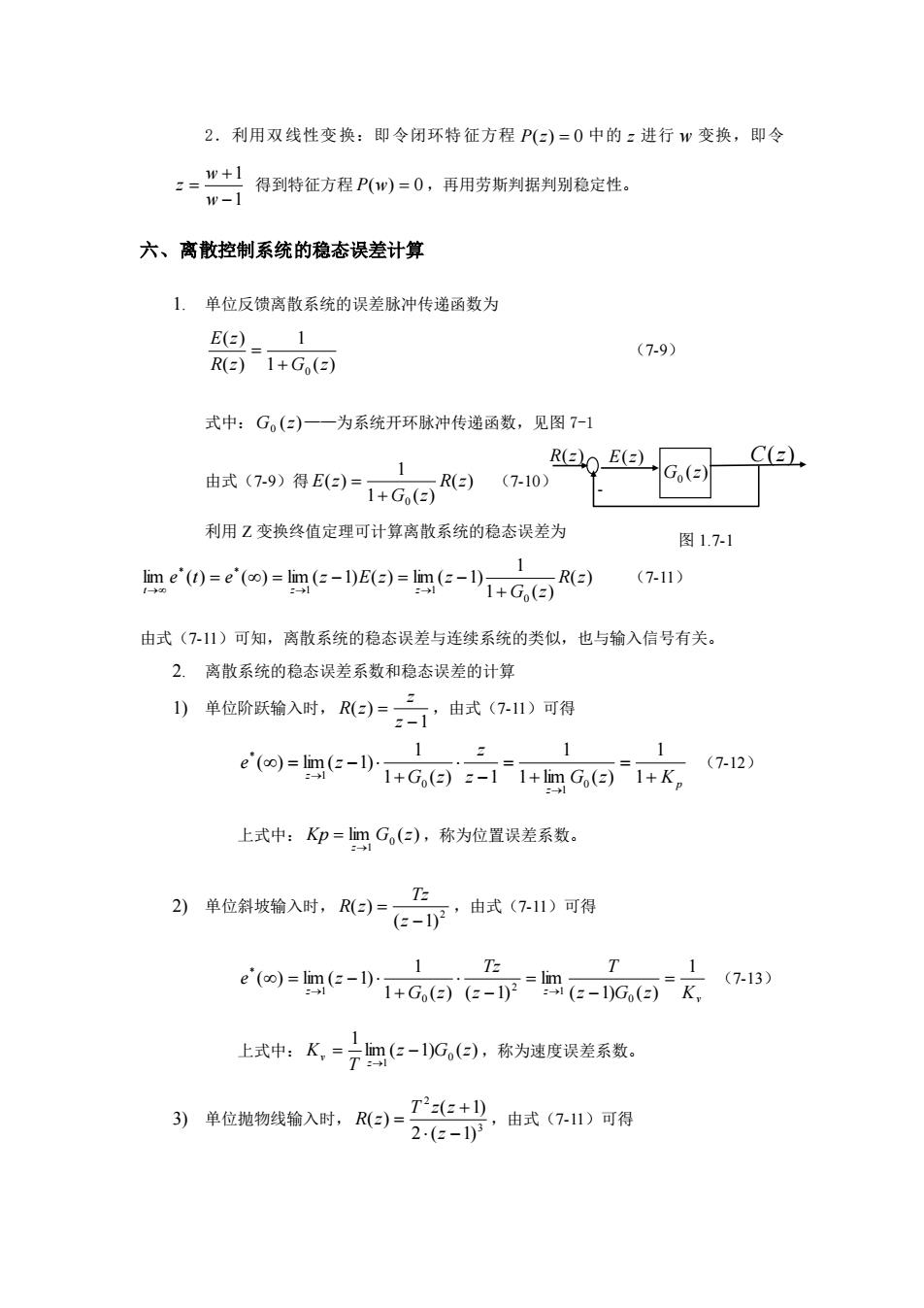
2.利用双线性变换:即令闭环特征方程P()=0中的:进行W变换,即令 :-”+!得到特征方程P)=0,再用芳斯判据判别稳定性。 w-1 六、离散控制系统的稳态误差计算 1.单位反馈离散系统的误差脉冲传递函数为 1 (7-9) R(=)1+G(=) 式中:G。(:)一一为系统开环脉冲传递函数,见图T-1 as.fc. C(z) 由t9》每e)-1+日)-0 1 利用Z变换终值定理可计算离散系统的稳态误差为 图1.7-1 1 mc0=co)=e-Be)=e-11+GaR89)(7.1D 由式(7-11)可知,离散系统的稳态误差与连续系统的类似,也与输入信号有关。 2.离散系统的稳态误差系数和稳态误差的计算 )单位阶跃输入时,)=三由式(.)可得 2 1 e四)=e-01+G,白:-1+mG,a1+K, (7-12 上式中:Kp=mG,(e,称为位置误差系数。 2)单位额坡输入时,9)产:一由式D可餐 1T: T eo)=-01+G,日e-e-q日》 上式中:K,=宁:-G,(,称为速度误差系数。 》单港物成输入时,眉日一仁.由式》司形 2.利用双线性变换:即令闭环特征方程 P(z) = 0 中的 z 进行 w 变换,即令 1 1 − + = w w z 得到特征方程 P(w) = 0 ,再用劳斯判据判别稳定性。 六、离散控制系统的稳态误差计算 1. 单位反馈离散系统的误差脉冲传递函数为 1 ( ) 1 ( ) ( ) 0 R z G z E z + = (7-9) 式中: ( ) 0 G z ——为系统开环脉冲传递函数,见图 7-1 由式(7-9)得 ( ) 1 ( ) 1 ( ) 0 R z G z E z + = (7-10) 利用 Z 变换终值定理可计算离散系统的稳态误差为 ( ) 1 ( ) 1 lim ( ) ( ) lim ( 1) ( ) lim ( 1) 0 1 1 * * R z G z e t e z E z z t z z + = = − = − → → → (7-11) 由式(7-11)可知,离散系统的稳态误差与连续系统的类似,也与输入信号有关。 2. 离散系统的稳态误差系数和稳态误差的计算 1) 单位阶跃输入时, 1 ( ) − = z z R z ,由式(7-11)可得 p z z z G z K z G z e z + = + = − + = − → → 1 1 1 lim ( ) 1 1 ( ) 1 1 ( ) lim ( 1) 0 1 0 1 * (7-12) 上式中: lim ( ) 0 1 Kp G z z→ = ,称为位置误差系数。 2) 单位斜坡输入时, 2 ( 1) ( ) − = z Tz R z ,由式(7-11)可得 v z z z G z K T z Tz G z e z 1 ( 1) ( ) lim 1 ( ) ( 1) 1 ( ) lim ( 1) 0 1 2 0 1 * = − = − + = − → → (7-13) 上式中: lim ( 1) ( ) 1 0 1 z G z T K z v = − → ,称为速度误差系数。 3) 单位抛物线输入时, 3 2 2 ( 1) ( 1) ( ) − + = z T z z R z ,由式(7-11)可得 ( ) 0 G z - R(z) E(z) C(z) 图 1.7-1