正在加载图片...
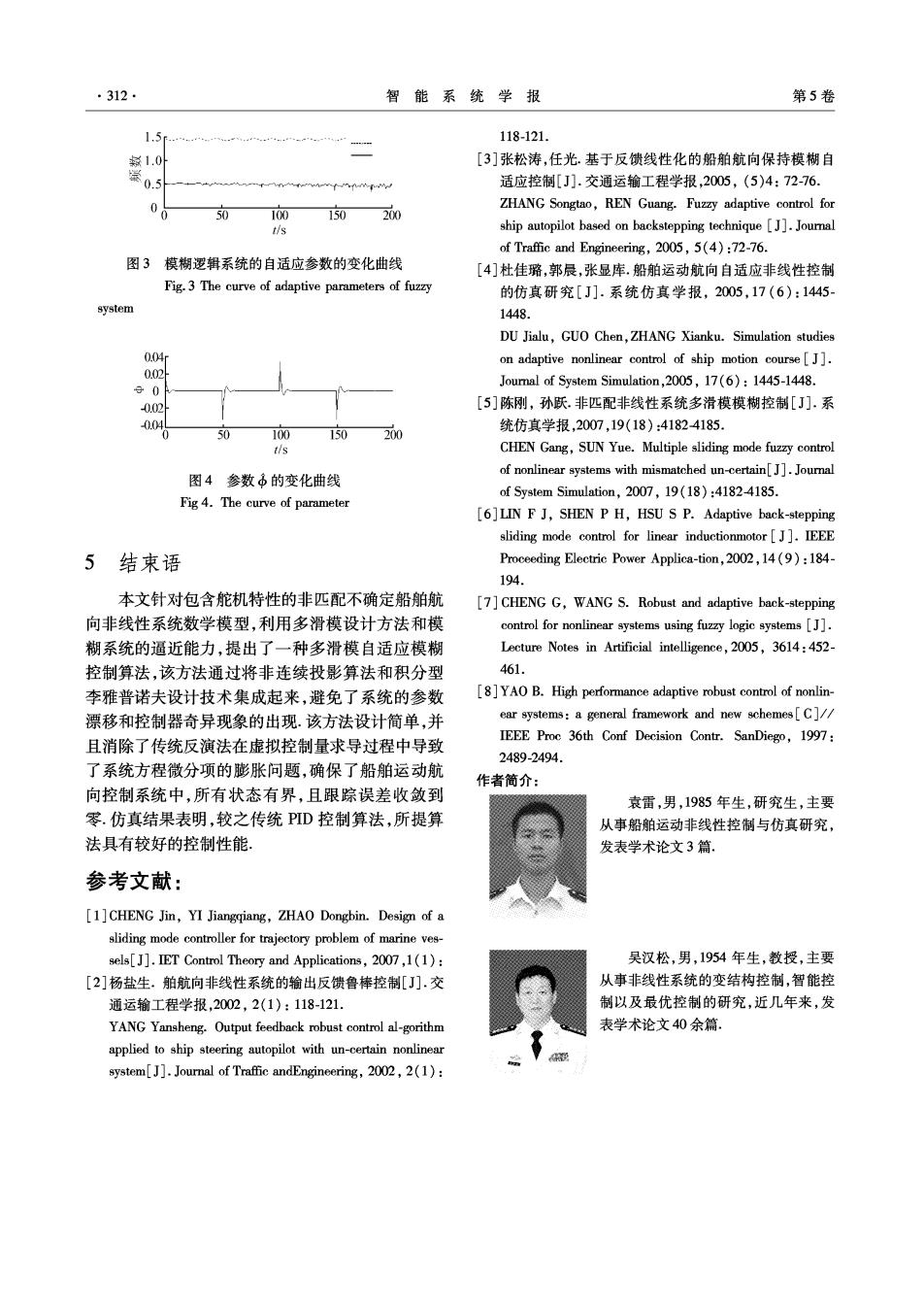
312. 智能系统学报 第5卷 1.5 118-121. 1.0 [3]张松涛,任光.基于反馈线性化的船舶航向保持模糊自 0.5 r-n-rwop-mfm-pw 适应控制[J].交通运输工程学报,2005,(5)4:72-76. ZHANG Songtao,REN Guang.Fuzzy adaptive control for 50 100 150 200 tis ship autopilot based on backstepping technique[].Joumal of Traffic and Engineering,2005,5(4):72-76. 图3模糊逻辑系统的自适应参数的变化曲线 [4]杜佳璐,郭晨,张显库.船舶运动航向自适应非线性控制 Fig.3 The curve of adaptive parameters of fuzzy 的仿真研究[J].系统仿真学报,2005,17(6):1445 system 1448. DU Jialu,GUO Chen,ZHANG Xianku.Simulation studies 0.04 on adaptive nonlinear control of ship motion course[J]. 002 Journal of System Simulation,2005,17(6):1445-1448. 90 0.02 [5]陈刚,孙跃.非匹配非线性系统多滑模模糊控制[J].系 0.04 统仿真学报,2007,19(18):41824185. 50 100 150 200 tis CHEN Gang,SUN Yue.Multiple sliding mode fuzzy control of nonlinear systems with mismatched un-certain[J].Journal 图4参数的变化曲线 of System Simulation,2007,19(18):4182-4185. Fig 4.The curve of parameter [6]LIN F J,SHEN P H,HSU S P.Adaptive back-stepping sliding mode control for linear inductionmotor[J].IEEE 5 结束语 Proceeding Electric Power Applica-tion,2002,14(9):184- 194. 本文针对包含舵机特性的非匹配不确定船舶航 [7]CHENG G,WANG S.Robust and adaptive back-stepping 向非线性系统数学模型,利用多滑模设计方法和模 control for nonlinear systems using fuzzy logic systems [J]. 糊系统的逼近能力,提出了一种多滑模自适应模糊 Lecture Notes in Artificial intelligence,2005,3614:452- 控制算法,该方法通过将非连续投影算法和积分型 461. 李雅普诺夫设计技术集成起来,避免了系统的参数 [8]YAO B.High performance adaptive robust control of nonlin- 漂移和控制器奇异现象的出现.该方法设计简单,并 ear systems:a general framework and new schemes C]// 且消除了传统反演法在虚拟控制量求导过程中导致 IEEE Proc 36th Conf Decision Contr.SanDiego,1997: 2489-2494. 了系统方程微分项的膨胀问题,确保了船舶运动航 作者简介: 向控制系统中,所有状态有界,且跟踪误差收敛到 袁雷,男,1985年生,研究生,主要 零.仿真结果表明,较之传统PD控制算法,所提算 从事船舶运动非线性控制与仿真研究, 法具有较好的控制性能. 发表学术论文3篇。 参考文献: [1]CHENG Jin,YI Jiangqiang,ZHAO Dongbin.Design of a sliding mode controller for trajectory problem of marine ves- sels[J].IET Control Theory and Applications,2007,1(1): 吴汉松,男,1954年生,教授,主要 [2]杨盐生.舶航向非线性系统的输出反馈鲁棒控制[J].交 从事非线性系统的变结构控制,智能控 通运输工程学报,2002,2(1):118-121. 制以及最优控制的研究,近几年来,发 YANG Yansheng.Output feedback robust control al-gorithm 表学术论文40余篇. applied to ship steering autopilot with un-certain nonlinear system[J].Journal of Traffic andEngineering,2002,2(1):