正在加载图片...
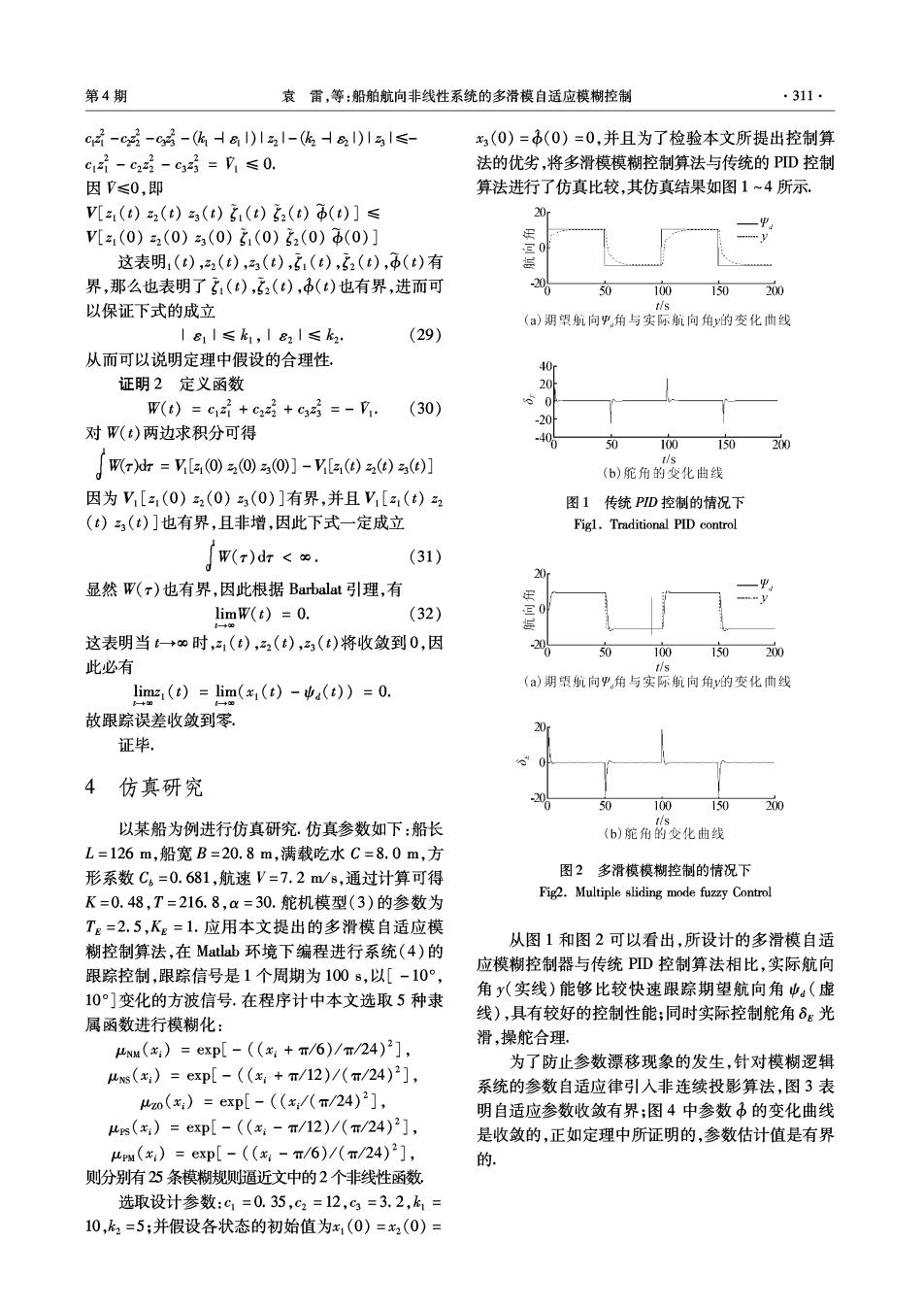
第4期 袁雷,等:船舶航向非线性系统的多滑模自适应模糊控制 ·311· c4-c好-6哈-k46)12-6)1≤- 3(0)=(0)=0,并且为了检验本文所提出控制算 c7-c2经-c3号=71≤0. 法的优劣,将多滑模模糊控制算法与传统的PD控制 因7≤0,即 算法进行了仿真比较,其仿真结果如图1~4所示. V[(t)2(t)3(t)(t)2(t)Φ(t)]≤ 20 V[(0)2(0)3(0)31(0)2(0)Φ(0)] 这表明1(t),2(t),3(t),i(t),32(t),中(t)有 界,那么也表明了1(t),32(t),()也有界,进而可 》 100 150200 以保证下式的成立 t/s ()期望航向平角与实际航向角y的变化曲线 |81|≤k1,IB2|≤k2, (29) 从而可以说明定理中假设的合理性 40r 证明2定义函数 20 W(t)=c12+c2+c3号=-7.(30) -20 对W(t)两边求积分可得 406 50 100 150200 」x出=V[a0)20)0]-V[(国(] 1/ (b)舵角的变化曲线 因为V[z(0)2(0)3(0)]有界,并且V1[(t)2 图1传统PD控制的情况下 (t)(t)]也有界,且非增,因此下式一定成立 Figl.Traditional PID control 」(x)dr<0. (31) 显然W(r)也有界,因此根据Barbalat引理,有 limW(t)=0. (32) 这表明当t→∞时,1(t),2(t),a3(t)将收敛到0,因 -20 50 100 150 200 此必有 ts limz(t)lim((t)-va(t))=0. (a)期望航向平角与实际航向角y的变化怕线 +四 故跟踪误差收敛到零 证毕。 4仿真研究 50 100 150 200 以某船为例进行仿真研究.仿真参数如下:船长 t/s (b)舵角的变化曲线 L=126m,船宽B=20.8m,满载吃水C=8.0m,方 形系数C6=0.681,航速V=7.2m/s,通过计算可得 图2多滑模模糊控制的情况下 K=0.48,T=216.8,α=30.舵机模型(3)的参数为 Fig2.Multiple sliding mode fuzzy Control Tg=2.5,K=1.应用本文提出的多滑模自适应模 糊控制算法,在Matlab环境下编程进行系统(4)的 从图1和图2可以看出,所设计的多滑模自适 应模糊控制器与传统PD控制算法相比,实际航向 跟踪控制,跟踪信号是1个周期为1008,以[-10°, 角y(实线)能够比较快速跟踪期望航向角(虚 10]变化的方波信号.在程序计中本文选取5种隶 线),具有较好的控制性能;同时实际控制舵角8ε光 属函数进行模糊化: 滑,操舵合理。 w(x)=exp[-((x+T/6)/r/24)2], 为了防止参数漂移现象的发生,针对模糊逻辑 (x:)=exp[-((x:+T/12)/(π/24)2], 系统的参数自适应律引入非连续投影算法,图3表 zo(x)=exp[-(x/(m/24)2], 明自适应参数收敛有界;图4中参数本的变化曲线 s(x)=exp[-(x-T/12)/(π/24)2], 是收敛的,正如定理中所证明的,参数估计值是有界 upw(x)=exp[-((x-T/6)/(π/24)2], 的 则分别有25条模糊规侧逼近文中的2个非线性函数 选取设计参数:c1=0.35,C2=12,c3=3.2,k1= 10,k2=5;并假设各状态的初始值为x,(0)=2(0)=