正在加载图片...
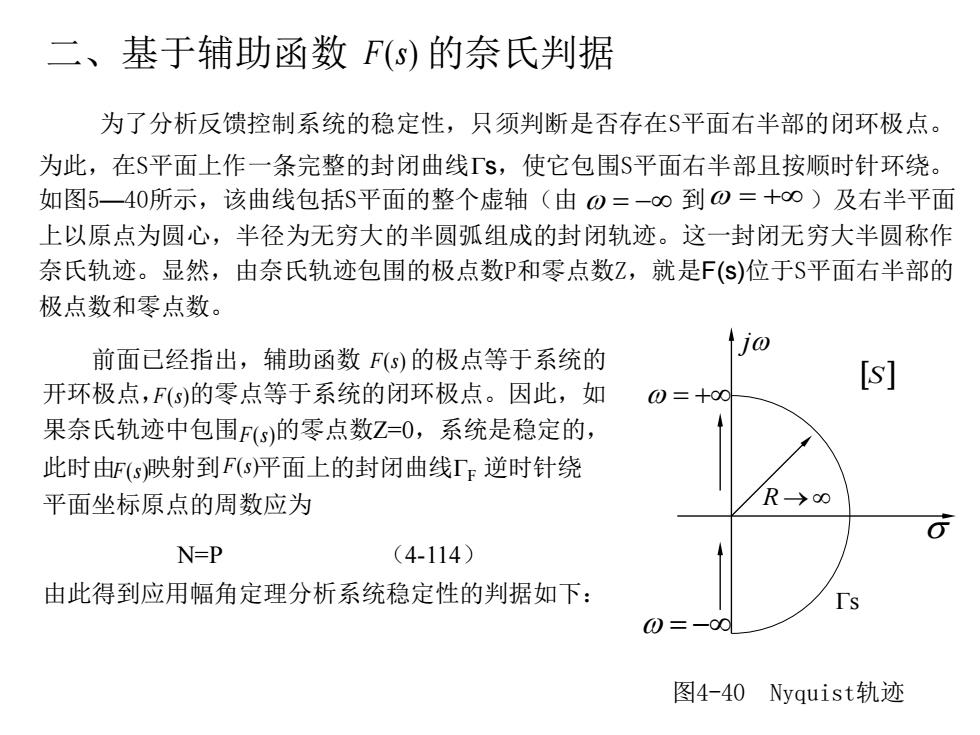
二、基于辅助函数F(s)的奈氏判据 为了分析反馈控制系统的稳定性,只须判断是否存在$平面右半部的闭环极点。 为此,在S平面上作一条完整的封闭曲线「s,使它包围$平面右半部且按顺时针环绕。 如图5一40所示,该曲线包括$平面的整个虚轴(由0=-00到0=+∞)及右半平面 上以原点为圆心,半径为无穷大的半圆弧组成的封闭轨迹。这一封闭无穷大半圆称作 奈氏轨迹。显然,由奈氏轨迹包围的极点数P和零点数Z,就是F(S)位于S平面右半部的 极点数和零点数。 前面已经指出,辅助函数F(s)的极点等于系统的 开环极点,F(s)的零点等于系统的闭环极点。因此,如 [S] 0=十00 果奈氏轨迹中包围Fs)的零点数Z=O,系统是稳定的, 此时由F(s)映射到Fs)平面上的封闭曲线厂F逆时针绕 平面坐标原点的周数应为 R>oo N-P (4-114) 由此得到应用幅角定理分析系统稳定性的判据如下: 图4-40 Nyquist轨迹 二、基于辅助函数 的奈氏判据 为了分析反馈控制系统的稳定性,只须判断是否存在S平面右半部的闭环极点。 为此,在S平面上作一条完整的封闭曲线s,使它包围S平面右半部且按顺时针环绕。 如图5—40所示,该曲线包括S平面的整个虚轴(由 到 )及右半平面 上以原点为圆心,半径为无穷大的半圆弧组成的封闭轨迹。这一封闭无穷大半圆称作 奈氏轨迹。显然,由奈氏轨迹包围的极点数P和零点数Z,就是F(s)位于S平面右半部的 极点数和零点数。 F(s) = − = + = + = − R → j S 图4-40 Nyquist轨迹 前面已经指出,辅助函数 的极点等于系统的 开环极点, 的零点等于系统的闭环极点。因此,如 果奈氏轨迹中包围 的零点数Z=0,系统是稳定的, 此时由 映射到 平面上的封闭曲线F 逆时针绕 平面坐标原点的周数应为 N=P (4-114) 由此得到应用幅角定理分析系统稳定性的判据如下: F(s) F(s) F(s) F(s) F(s) s