正在加载图片...
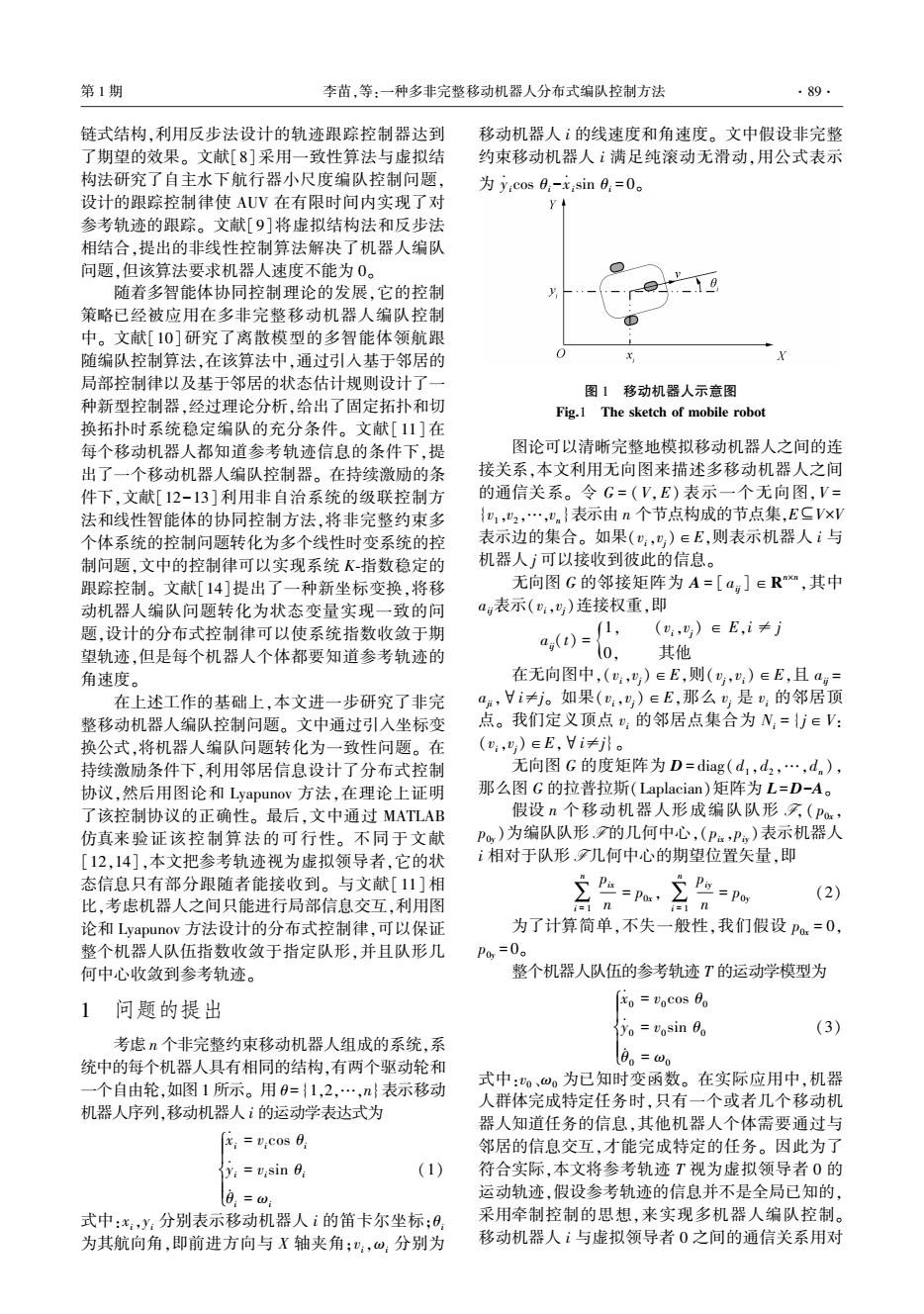
第1期 李苗,等:一种多非完整移动机器人分布式编队控制方法 .89 链式结构,利用反步法设计的轨迹跟踪控制器达到 移动机器人i的线速度和角速度。文中假设非完整 了期望的效果。文献[8]采用一致性算法与虚拟结 约束移动机器人i满足纯滚动无滑动,用公式表示 构法研究了自主水下航行器小尺度编队控制问题, 为y:cos0:-x:sin0=0。 设计的跟踪控制律使AUV在有限时间内实现了对 参考轨迹的跟踪。文献[9]将虚拟结构法和反步法 相结合,提出的非线性控制算法解决了机器人编队 问题,但该算法要求机器人速度不能为0。 随着多智能体协同控制理论的发展,它的控制 策略已经被应用在多非完整移动机器人编队控制 中。文献[10]研究了离散模型的多智能体领航跟 随编队控制算法,在该算法中,通过引入基于邻居的 局部控制律以及基于邻居的状态估计规则设计了一 图1移动机器人示意图 种新型控制器,经过理论分析,给出了固定拓扑和切 Fig.I The sketch of mobile robot 换拓扑时系统稳定编队的充分条件。文献[11]在 每个移动机器人都知道参考轨迹信息的条件下,提 图论可以清晰完整地模拟移动机器人之间的连 出了一个移动机器人编队控制器。在持续激励的条 接关系,本文利用无向图来描述多移动机器人之间 件下,文献[12-13]利用非自治系统的级联控制方 的通信关系。令G=(V,E)表示一个无向图,V= 法和线性智能体的协同控制方法,将非完整约束多 {,2,…,n}表示由n个节点构成的节点集,ECVXV 个体系统的控制问题转化为多个线性时变系统的控 表示边的集合。如果(:,)∈E,则表示机器人i与 制问题,文中的控制律可以实现系统K指数稳定的 机器人了可以接收到彼此的信息。 跟踪控制。文献[14]提出了一种新坐标变换,将移 无向图G的邻接矩阵为A=[a:]eR“,其中 动机器人编队问题转化为状态变量实现一致的问 a表示(:,y)连接权重,即 题,设计的分布式控制律可以使系统指数收敛于期 1, a(t)= (:,)∈E,i≠j 望轨迹,但是每个机器人个体都要知道参考轨迹的 0. 其他 角速度。 在无向图中,(,号)∈E,则(,:)∈E,且ag= 在上述工作的基础上,本文进一步研究了非完 a,ij。如果(,y)∈E,那么是,的邻居顶 整移动机器人编队控制问题。文中通过引入坐标变 点。我们定义顶点:的邻居点集合为N=∈V: 换公式,将机器人编队问题转化为一致性问题。在 (:,y)∈E,i≠。 持续激励条件下,利用邻居信息设计了分布式控制 无向图G的度矩阵为D=diag(d1,d2,…,dn), 协议,然后用图论和Lyapunov方法,在理论上证明 那么图G的拉普拉斯(Laplacian)矩阵为L=D-A。 了该控制协议的正确性。最后,文中通过MATLAB 假设n个移动机器人形成编队队形牙,(P, 仿真来验证该控制算法的可行性。不同于文献 Po,)为编队队形的几何中心,(PP)表示机器人 [12,14],本文把参考轨迹视为虚拟领导者,它的状 i相对于队形穿几何中心的期望位置矢量,即 态信息只有部分跟随者能接收到。与文献[11]相 ,二Poy (2) 比,考虑机器人之间只能进行局部信息交互,利用图 n 论和Lyapunov方法设计的分布式控制律,可以保证 为了计算简单,不失一般性,我们假设P.=0, 整个机器人队伍指数收敛于指定队形,并且队形几 P0,=0。 何中心收敛到参考轨迹。 整个机器人队伍的参考轨迹T的运动学模型为 1 问题的提出 [xo =vocos 0o yo="osin8。 (3) 考虑个非完整约束移动机器人组成的系统,系 统中的每个机器人具有相同的结构,有两个驱动轮和 0=o 一个自由轮,如图1所示。用0={1,2,…,n}表示移动 式中:o、wo为已知时变函数。在实际应用中,机器 机器人序列,移动机器人i的运动学表达式为 人群体完成特定任务时,只有一个或者几个移动机 器人知道任务的信息,其他机器人个体需要通过与 x:=v.cos 0 邻居的信息交互,才能完成特定的任务。因此为了 yi=visin 0 (1) 符合实际,本文将参考轨迹T视为虚拟领导者0的 8=w 运动轨迹,假设参考轨迹的信息并不是全局已知的, 式中:x,y:分别表示移动机器人i的笛卡尔坐标:0 采用牵制控制的思想,来实现多机器人编队控制。 为其航向角,即前进方向与X轴夹角;,w:分别为 移动机器人i与虚拟领导者0之间的通信关系用对链式结构,利用反步法设计的轨迹跟踪控制器达到 了期望的效果。 文献[8]采用一致性算法与虚拟结 构法研究了自主水下航行器小尺度编队控制问题, 设计的跟踪控制律使 AUV 在有限时间内实现了对 参考轨迹的跟踪。 文献[9]将虚拟结构法和反步法 相结合,提出的非线性控制算法解决了机器人编队 问题,但该算法要求机器人速度不能为 0。 随着多智能体协同控制理论的发展,它的控制 策略已经被应用在多非完整移动机器人编队控制 中。 文献[10]研究了离散模型的多智能体领航跟 随编队控制算法,在该算法中,通过引入基于邻居的 局部控制律以及基于邻居的状态估计规则设计了一 种新型控制器,经过理论分析,给出了固定拓扑和切 换拓扑时系统稳定编队的充分条件。 文献[11] 在 每个移动机器人都知道参考轨迹信息的条件下,提 出了一个移动机器人编队控制器。 在持续激励的条 件下,文献[12-13]利用非自治系统的级联控制方 法和线性智能体的协同控制方法,将非完整约束多 个体系统的控制问题转化为多个线性时变系统的控 制问题,文中的控制律可以实现系统 K⁃指数稳定的 跟踪控制。 文献[14]提出了一种新坐标变换,将移 动机器人编队问题转化为状态变量实现一致的问 题,设计的分布式控制律可以使系统指数收敛于期 望轨迹,但是每个机器人个体都要知道参考轨迹的 角速度。 在上述工作的基础上,本文进一步研究了非完 整移动机器人编队控制问题。 文中通过引入坐标变 换公式,将机器人编队问题转化为一致性问题。 在 持续激励条件下,利用邻居信息设计了分布式控制 协议,然后用图论和 Lyapunov 方法,在理论上证明 了该控制协议的正确性。 最后,文中通过 MATLAB 仿真来验证该控制算法的可行性。 不同于文献 [12,14],本文把参考轨迹视为虚拟领导者,它的状 态信息只有部分跟随者能接收到。 与文献[11] 相 比,考虑机器人之间只能进行局部信息交互,利用图 论和 Lyapunov 方法设计的分布式控制律,可以保证 整个机器人队伍指数收敛于指定队形,并且队形几 何中心收敛到参考轨迹。 1 问题的提出 考虑 n 个非完整约束移动机器人组成的系统,系 统中的每个机器人具有相同的结构,有两个驱动轮和 一个自由轮,如图 1 所示。 用 θ={1,2,…,n}表示移动 机器人序列,移动机器人 i 的运动学表达式为 x · i = vi cos θi y · i = vi sin θi θ · i = ωi ì î í ï ï ï ï (1) 式中:xi,yi 分别表示移动机器人 i 的笛卡尔坐标;θi 为其航向角,即前进方向与 X 轴夹角;vi,ωi 分别为 移动机器人 i 的线速度和角速度。 文中假设非完整 约束移动机器人 i 满足纯滚动无滑动,用公式表示 为 y · i cos θi -x · i sin θi = 0。 图 1 移动机器人示意图 Fig.1 The sketch of mobile robot 图论可以清晰完整地模拟移动机器人之间的连 接关系,本文利用无向图来描述多移动机器人之间 的通信关系。 令 G = ( V,E) 表示一个无向图,V = {v1,v2,…,vn }表示由 n 个节点构成的节点集,E⊆V×V 表示边的集合。 如果(vi,vj)∈E,则表示机器人 i 与 机器人 j 可以接收到彼此的信息。 无向图 G 的邻接矩阵为 A = [ aij ] ∈R n×n ,其中 aij表示(vi,vj)连接权重,即 aij(t) = 1, (vi,vj) ∈ E,i ≠ j {0, 其他 在无向图中,(vi,vj)∈E,则(vj,vi)∈E,且 aij = aji,∀i≠j。 如果(vi,vj)∈E,那么 vj 是 vi 的邻居顶 点。 我们定义顶点 vi 的邻居点集合为 Ni = { j∈V: (vi,vj)∈E,∀i≠j}。 无向图 G 的度矩阵为 D = diag( d1 ,d2 ,…,dn ), 那么图 G 的拉普拉斯(Laplacian)矩阵为 L =D-A。 假设 n 个移动机器人形成编队队形 F,( p0x, p0y)为编队队形 F 的几何中心,(pix,piy)表示机器人 i 相对于队形 F 几何中心的期望位置矢量,即 ∑ n i = 1 pix n = p0x, ∑ n i = 1 piy n = p0y (2) 为了计算简单,不失一般性,我们假设 p0x = 0, p0y = 0。 整个机器人队伍的参考轨迹 T 的运动学模型为 x · 0 = v0 cos θ0 y · 0 = v0 sin θ0 θ · 0 = ω0 ì î í ï ï ï ï (3) 式中:v0 、ω0 为已知时变函数。 在实际应用中,机器 人群体完成特定任务时,只有一个或者几个移动机 器人知道任务的信息,其他机器人个体需要通过与 邻居的信息交互,才能完成特定的任务。 因此为了 符合实际,本文将参考轨迹 T 视为虚拟领导者 0 的 运动轨迹,假设参考轨迹的信息并不是全局已知的, 采用牵制控制的思想,来实现多机器人编队控制。 移动机器人 i 与虚拟领导者 0 之间的通信关系用对 第 1 期 李苗,等:一种多非完整移动机器人分布式编队控制方法 ·89·