正在加载图片...
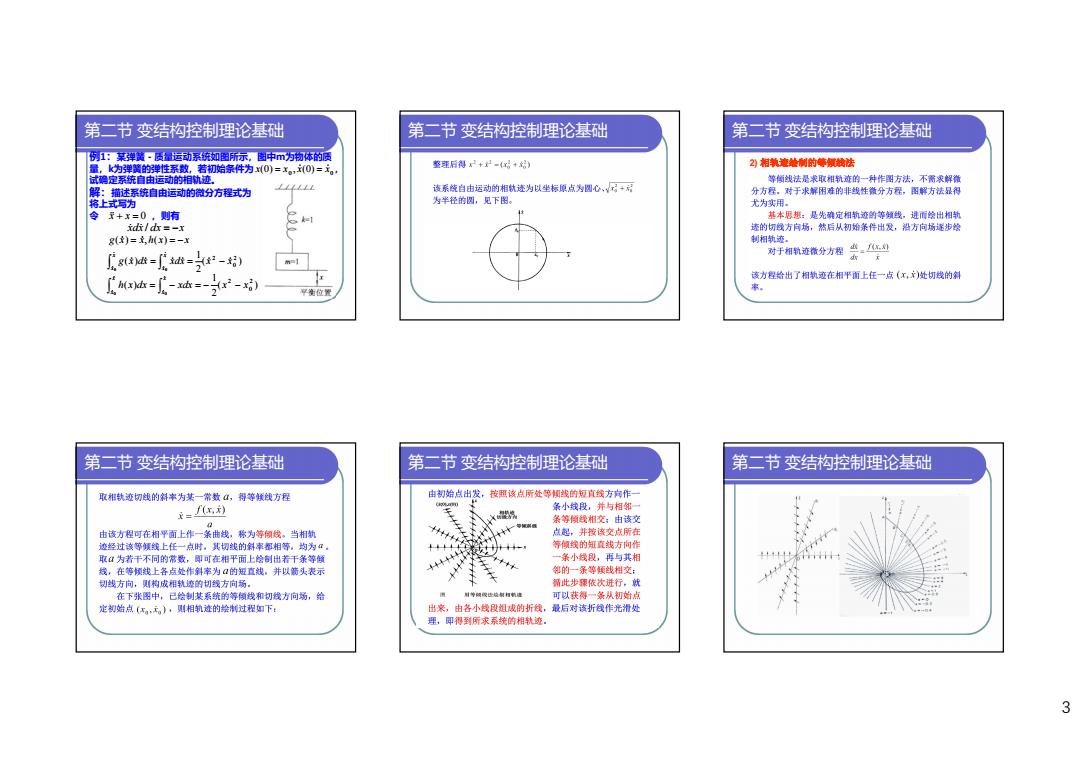
第二节变结构控制理论基础 第二节变结构控制理论基础 第二节变结构控制理论基础 例1:弹簧。质量运动系统如密所标示,韵中m为物体的质 量,k为弹簧的弹性系数,若初始条件为x(0)=x。,(0)=, 整递后得+-x+) 2)相教旋地制的等领输法 试确定系统自由运动的相轨迹。 等领线法是来取相轨迹的一种作图方法,不需求解微 解:描述系统自由运动的微分方程式为 该系饶自由运动的相轨迹为以坐标原点为圆心、√+用 分方程。对于求解困难的非线性微分方程,图解方法显得 将上式写为 为半轻的圆,见下图。 尤为实用。 令天+x=0,则有 基本思想:是先确定相轨迹的等领线。进而绘出相制 d/d止=-x 迹的切线方向场,然后从初始条件出爱,沿方向场逐步绘 ()=克,Mx)=-x 制相轨迹。 瓜-越=-划 对于相轨迹微分方程些。任 m-1 h=-h-对 该方程给出了相轨迹在相平面上任一点(x,)处切线的斜 平衡位 案。 第二节变结构控制理论基础 第二节变结构控制理论基础 第二节变结构控制理论基础 取相轨迹切线的斜案为某一常数:,得等领线方程 由初始点出发,按题该点所处等顿线的短直线方向作 R=x,初 条小线段,并与相细 由该方程可在相平面上作一条曲线。称为等倾线。当相轨 大a 条等倾线相交:由该交 点起,并按该交点所在 迹经过该等倾线上任一点时。其切线的斜率都相等。均为:。 等慎线的短直线方向作 取“为若干不同的常数,即可在湘平面上绘制出若干条等顿 一条小线段,再与其相 线,在等倾线上各点处作斜率为口的短直线。并以箭头表示 邻的一条等便线相交: 划线方向,则构成相轨迹的切线方向场。 痛此步骤依次进行,就 在下张图中,已绘制某系统的等倾线和切线方向场,给 目带阅现达地制有的速 可以获得一条从初始点 定初始点(,无),则相轨迹的绘彬过程如下: 出来,由各小线段姐减的折线,最后对该折线作光滑处 理,即得到所求系统的相轨迹。 33 第二节 变结构控制理论基础 例1:某弹簧-质量运动系统如图所示,图中m为物体的质 量,k为弹簧的弹性系数,若初始条件为 , 试确定系统自由运动的相轨迹。 解:描述系统自由运动的微分方程式为 将上式写为 令 ,则有 0 0 x(0) x , x(0) x x x 0 xdx dx x / g(x) x, h( x) x ( ) 2 1 ( ) 2 0 2 0 0 g x dx xdx x x x x x x ( ) 2 1 ( ) 2 0 2 0 0 h x dx xdx x x x x x x 第二节 变结构控制理论基础 第二节 变结构控制理论基础 2) 相轨迹绘制的等倾线法 第二节 变结构控制理论基础 第二节 变结构控制理论基础 第二节 变结构控制理论基础