正在加载图片...
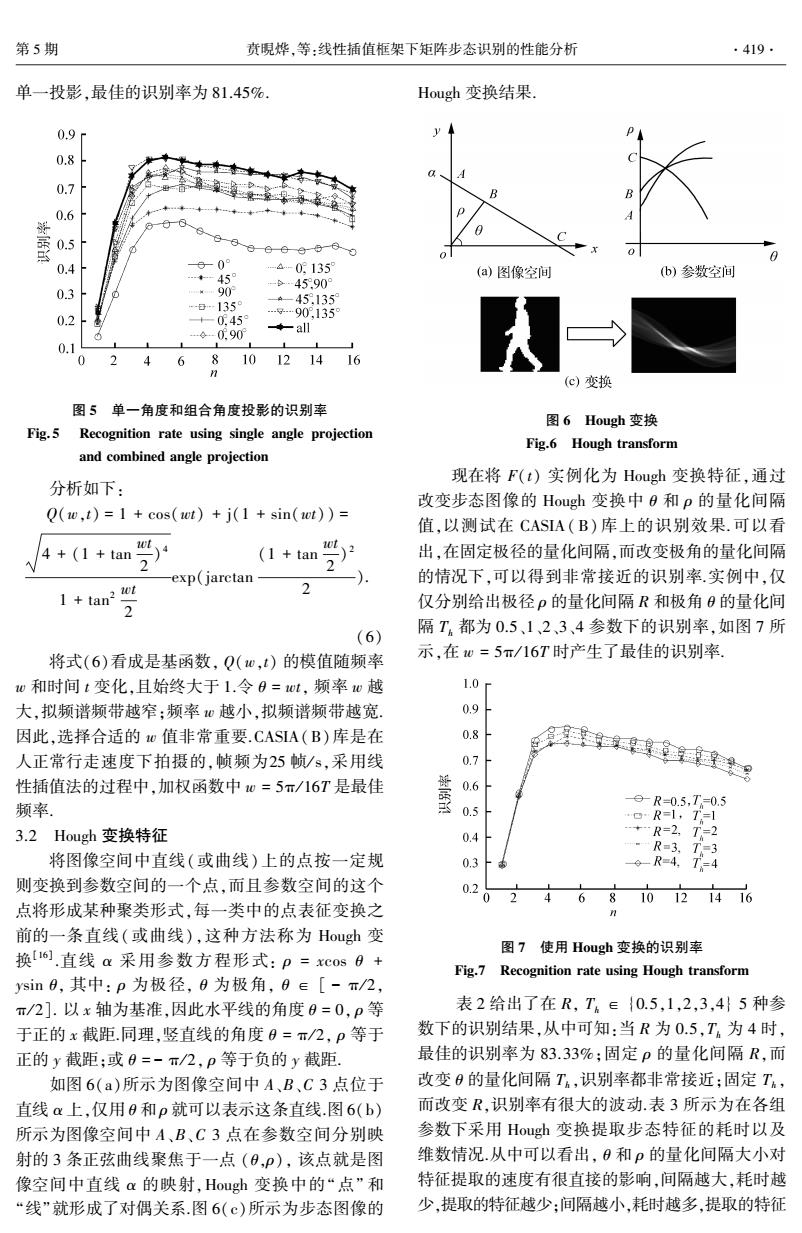
第5期 贲硯烨,等:线性插值框架下矩阵步态识别的性能分析 419. 单一投影,最佳的识别率为81.45%. Hough变换结果. 0.9r y 0.8 0.7 0.6 季 0.5 0 0.4 60° -4-0135 …◆-459 (a)图像空间 b)参数空间 -6-45909 0.3 -日…1359 445135 0.2 +-0.459 …g909,135 …g-0.90 ◆all 0.1 1 0 46810121416 (c)变换 图5单一角度和组合角度投影的识别率 图6 Hough变换 Fig.5 Recognition rate using single angle projection Fig.6 Hough transform and combined angle projection 现在将F(t)实例化为Hough变换特征,通过 分析如下: 改变步态图像的Hough变换中0和p的量化间隔 Q(w,t)=1 cos(wt)+j(1 sin(wt))= 值,以测试在CASIA(B)库上的识别效果.可以看 4+(1+tan2 1+am学 出,在固定极径的量化间隔,而改变极角的量化间隔 exp(jarctan 的情况下,可以得到非常接近的识别率.实例中,仅 1+tan? 2 仅分别给出极径p的量化间隔R和极角8的量化间 隔T都为0.5、1、2、3、4参数下的识别率,如图7所 (6) 将式(6)看成是基函数,Q(w,t)的模值随频率 示,在0=5π/16T时产生了最佳的识别率. w和时间t变化,且始终大于1.令0=wt,频率w越 1.0r 大,拟频谱频带越窄:频率心越小,拟频谱频带越宽. o 因此,选择合适的地值非常重要.CASIA(B)库是在 0.8 人正常行走速度下拍摄的,帧频为25帧/s,采用线 0.7 生痒g 性插值法的过程中,加权函数中0=5π/16T是最佳 薹 0.6 频率。 05 9R-0.5,T=0.5 oR=1,T=1 3.2 Hough变换特征 0.4 +R=2,T=2 R=3,T3 将图像空间中直线(或曲线)上的点按一定规 0.3 6-R=4,T4 则变换到参数空间的一个点,而且参数空间的这个 0.2 0 6 810121416 点将形成某种聚类形式,每一类中的点表征变换之 前的一条直线(或曲线),这种方法称为Hough变 换[16].直线a采用参数方程形式:p=xCos0+ 图7使用Hough变换的识别率 Fig.7 Recognition rate using Hough transform ysin0,其中:p为极径,0为极角,0e[-π/2, π/2].以x轴为基准,因此水平线的角度0=0,p等 表2给出了在R,T∈{0.5,1,2,3,4}5种参 于正的x截距.同理,竖直线的角度0=π/2,p等于 数下的识别结果,从中可知:当R为0.5,T。为4时, 正的y截距;或0=-π/2,p等于负的y截距. 最佳的识别率为83.33%;固定p的量化间隔R,而 如图6(a)所示为图像空间中A、B、C3点位于 改变0的量化间隔T,识别率都非常接近;固定T, 直线α上,仅用0和p就可以表示这条直线.图6(b) 而改变R,识别率有很大的波动.表3所示为在各组 所示为图像空间中A、B、C3点在参数空间分别映 参数下采用Hough变换提取步态特征的耗时以及 射的3条正弦曲线聚焦于一点(0,P),该点就是图 维数情况.从中可以看出,0和p的量化间隔大小对 像空间中直线α的映射,Hough变换中的“点”和 特征提取的速度有很直接的影响,间隔越大,耗时越 “线”就形成了对偶关系.图6(©)所示为步态图像的 少,提取的特征越少:间隔越小,耗时越多,提取的特征单一投影ꎬ最佳的识别率为 81.45%. 图 5 单一角度和组合角度投影的识别率 Fig. 5 Recognition rate using single angle projection and combined angle projection 分析如下: Q(wꎬt) = 1 + cos(wt) + j(1 + sin(wt)) = 4 + (1 + tan wt 2 ) 4 1 + tan 2 wt 2 exp(jarctan (1 + tan wt 2 ) 2 2 ). (6) 将式(6)看成是基函数ꎬ Q(wꎬt) 的模值随频率 w 和时间 t 变化ꎬ且始终大于 1.令 θ = wtꎬ 频率 w 越 大ꎬ拟频谱频带越窄ꎻ频率 w 越小ꎬ拟频谱频带越宽. 因此ꎬ选择合适的 w 值非常重要.CASIA(B)库是在 人正常行走速度下拍摄的ꎬ帧频为25 帧/ sꎬ采用线 性插值法的过程中ꎬ加权函数中 w = 5π/ 16T 是最佳 频率. 3.2 Hough 变换特征 将图像空间中直线(或曲线) 上的点按一定规 则变换到参数空间的一个点ꎬ而且参数空间的这个 点将形成某种聚类形式ꎬ每一类中的点表征变换之 前的一条直线(或曲线)ꎬ这种方法称为 Hough 变 换[16] .直线 α 采用参数方程形式: ρ = xcos θ + ysin θꎬ 其中: ρ 为极径ꎬ θ 为极角ꎬ θ ∈ [ - π/ 2ꎬ π/ 2]. 以 x 轴为基准ꎬ因此水平线的角度 θ = 0ꎬ ρ 等 于正的 x 截距.同理ꎬ竖直线的角度 θ = π/ 2ꎬ ρ 等于 正的 y 截距ꎻ或 θ = - π/ 2ꎬ ρ 等于负的 y 截距. 如图 6(a)所示为图像空间中 A、B、C 3 点位于 直线 α 上ꎬ仅用 θ 和 ρ 就可以表示这条直线.图 6(b) 所示为图像空间中 A、B、C 3 点在参数空间分别映 射的 3 条正弦曲线聚焦于一点 (θꎬρ)ꎬ 该点就是图 像空间中直线 α 的映射ꎬHough 变换中的“点” 和 “线”就形成了对偶关系.图 6(c)所示为步态图像的 Hough 变换结果. 图 6 Hough 变换 Fig.6 Hough transform 现在将 F(t) 实例化为 Hough 变换特征ꎬ通过 改变步态图像的 Hough 变换中 θ 和 ρ 的量化间隔 值ꎬ以测试在 CASIA(B) 库上的识别效果. 可以看 出ꎬ在固定极径的量化间隔ꎬ而改变极角的量化间隔 的情况下ꎬ可以得到非常接近的识别率.实例中ꎬ仅 仅分别给出极径 ρ 的量化间隔 R 和极角 θ 的量化间 隔 Th 都为 0.5、1、2、3、4 参数下的识别率ꎬ如图 7 所 示ꎬ在 w = 5π/ 16T 时产生了最佳的识别率. 图 7 使用 Hough 变换的识别率 Fig.7 Recognition rate using Hough transform 表 2 给出了在 Rꎬ Th ∈ {0.5ꎬ1ꎬ2ꎬ3ꎬ4} 5 种参 数下的识别结果ꎬ从中可知:当 R 为 0.5ꎬTh 为 4 时ꎬ 最佳的识别率为 83.33%ꎻ固定 ρ 的量化间隔 Rꎬ而 改变 θ 的量化间隔 Th ꎬ识别率都非常接近ꎻ固定 Th ꎬ 而改变 Rꎬ识别率有很大的波动.表 3 所示为在各组 参数下采用 Hough 变换提取步态特征的耗时以及 维数情况.从中可以看出ꎬ θ 和 ρ 的量化间隔大小对 特征提取的速度有很直接的影响ꎬ间隔越大ꎬ耗时越 少ꎬ提取的特征越少ꎻ间隔越小ꎬ耗时越多ꎬ提取的特征 第 5 期 贲晛烨ꎬ等:线性插值框架下矩阵步态识别的性能分析 419