正在加载图片...
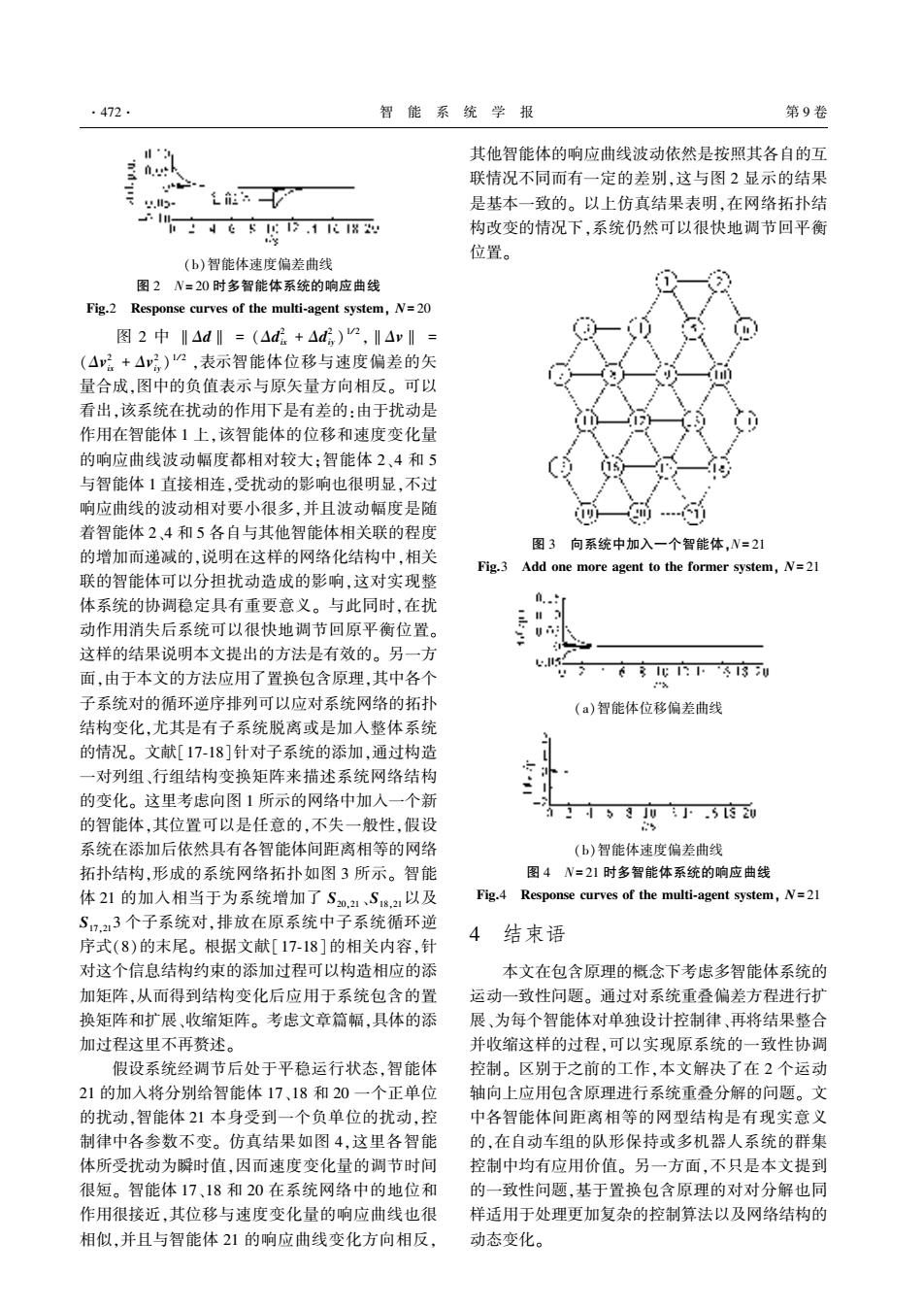
.472. 智能系统学报 第9卷 其他智能体的响应曲线波动依然是按照其各自的互 联情况不同而有一定的差别,这与图2显示的结果 .- 1iaV 是基本一致的。以上仿真结果表明,在网络拓扑结 子"士465g市1型 构改变的情况下,系统仍然可以很快地调节回平衡 y (b)智能体速度偏差曲线 位置。 图2N=20时多智能体系统的响应曲线 Fig.2 Response curves of the multi-agent system,N=20 图2中‖△d‖=(△d+△d)2,‖△v‖= (△+△)2,表示智能体位移与速度偏差的矢 量合成,图中的负值表示与原矢量方向相反。可以 看出,该系统在扰动的作用下是有差的:由于扰动是 作用在智能体1上,该智能体的位移和速度变化量 的响应曲线波动幅度都相对较大:智能体2、4和5 与智能体1直接相连,受扰动的影响也很明显,不过 响应曲线的波动相对要小很多,并且波动幅度是随 着智能体2、4和5各自与其他智能体相关联的程度 图3向系统中加入一个智能体,N=21 的增加而递减的,说明在这样的网络化结构中,相关 Fig.3 Add one more agent to the former system,N=21 联的智能体可以分担扰动造成的影响,这对实现整 体系统的协调稳定具有重要意义。与此同时,在扰 动作用消失后系统可以很快地调节回原平衡位置。 这样的结果说明本文提出的方法是有效的。另一方 面,由于本文的方法应用了置换包含原理,其中各个 氵·亨北六$3w 子系统对的循环逆序排列可以应对系统网络的拓扑 (a)智能体位移偏差曲线 结构变化,尤其是有子系统脱离或是加入整体系统 的情况。文献[17-18]针对子系统的添加,通过构造 一对列组、行组结构变换矩阵来描述系统网络结构 的变化。这里考虑向图1所示的网络中加入一个新 63J0小.5刘 的智能体,其位置可以是任意的,不失一般性,假设 系统在添加后依然具有各智能体间距离相等的网络 (b)智能体速度偏差曲线 拓扑结构,形成的系统网络拓扑如图3所示。智能 图4N=21时多智能体系统的响应曲线 体21的加入相当于为系统增加了S0.21、Ss.21以及 Fig.4 Response curves of the multi-agent system,N=21 S,213个子系统对,排放在原系统中子系统循环逆 4结束语 序式(8)的末尾。根据文献[17-18]的相关内容,针 对这个信息结构约束的添加过程可以构造相应的添 本文在包含原理的概念下考虑多智能体系统的 加矩阵,从而得到结构变化后应用于系统包含的置 运动一致性问题。通过对系统重叠偏差方程进行扩 换矩阵和扩展、收缩矩阵。考虑文章篇幅,具体的添 展、为每个智能体对单独设计控制律、再将结果整合 加过程这里不再赘述。 并收缩这样的过程,可以实现原系统的一致性协调 假设系统经调节后处于平稳运行状态,智能体 控制。区别于之前的工作,本文解决了在2个运动 21的加入将分别给智能体17、18和20一个正单位 轴向上应用包含原理进行系统重叠分解的问题。文 的扰动,智能体21本身受到一个负单位的扰动,控 中各智能体间距离相等的网型结构是有现实意义 制律中各参数不变。仿真结果如图4,这里各智能 的,在自动车组的队形保持或多机器人系统的群集 体所受扰动为瞬时值,因而速度变化量的调节时间 控制中均有应用价值。另一方面,不只是本文提到 很短。智能体17、18和20在系统网络中的地位和 的一致性问题,基于置换包含原理的对对分解也同 作用很接近,其位移与速度变化量的响应曲线也很 样适用于处理更加复杂的控制算法以及网络结构的 相似,并且与智能体21的响应曲线变化方向相反, 动态变化。渊遭冤智能体速度偏差曲线 图 圆摇 晕越 圆园 时多智能体系统的响应曲线 云蚤早援圆摇 砸藻泽责燥灶泽藻 糟怎则增藻泽 燥枣 贼澡藻 皂怎造贼蚤鄄葬早藻灶贼 泽赠泽贼藻皂袁 晕越 圆园 摇 摇 图 圆 中 椰驻凿椰 越 渊驻凿圆 蚤曾 垣 驻凿圆 蚤赠冤员辕 圆 袁椰驻增椰 越 渊驻增圆 蚤曾 垣 驻增圆 蚤赠冤员辕 圆 袁表示智能体位移与速度偏差的矢 量合成袁图中的负值表示与原矢量方向相反遥 可以 看出袁该系统在扰动的作用下是有差的院由于扰动是 作用在智能体 员 上袁该智能体的位移和速度变化量 的响应曲线波动幅度都相对较大曰智能体 圆尧源 和 缘 与智能体 员 直接相连袁受扰动的影响也很明显袁不过 响应曲线的波动相对要小很多袁并且波动幅度是随 着智能体 圆尧源 和 缘 各自与其他智能体相关联的程度 的增加而递减的袁说明在这样的网络化结构中袁相关 联的智能体可以分担扰动造成的影响袁这对实现整 体系统的协调稳定具有重要意义遥 与此同时袁在扰 动作用消失后系统可以很快地调节回原平衡位置遥 这样的结果说明本文提出的方法是有效的遥 另一方 面袁由于本文的方法应用了置换包含原理袁其中各个 子系统对的循环逆序排列可以应对系统网络的拓扑 结构变化袁尤其是有子系统脱离或是加入整体系统 的情况遥 文献咱员苑鄄员愿暂针对子系统的添加袁通过构造 一对列组尧行组结构变换矩阵来描述系统网络结构 的变化遥 这里考虑向图 员 所示的网络中加入一个新 的智能体袁其位置可以是任意的袁不失一般性袁假设 系统在添加后依然具有各智能体间距离相等的网络 拓扑结构袁形成的系统网络拓扑如图 猿 所示遥 智能 体 圆员 的加入相当于为系统增加了 杂圆园袁圆员 尧杂员愿袁圆员以及 杂员苑袁圆员猿 个子系统对袁排放在原系统中子系统循环逆 序式渊愿冤的末尾遥 根据文献咱 员苑鄄员愿暂的相关内容袁针 对这个信息结构约束的添加过程可以构造相应的添 加矩阵袁从而得到结构变化后应用于系统包含的置 换矩阵和扩展尧收缩矩阵遥 考虑文章篇幅袁具体的添 加过程这里不再赘述遥 假设系统经调节后处于平稳运行状态袁智能体 圆员 的加入将分别给智能体 员苑尧员愿 和 圆园 一个正单位 的扰动袁智能体 圆员 本身受到一个负单位的扰动袁控 制律中各参数不变遥 仿真结果如图 源袁这里各智能 体所受扰动为瞬时值袁因而速度变化量的调节时间 很短遥 智能体 员苑尧员愿 和 圆园 在系统网络中的地位和 作用很接近袁其位移与速度变化量的响应曲线也很 相似袁并且与智能体 圆员 的响应曲线变化方向相反袁 其他智能体的响应曲线波动依然是按照其各自的互 联情况不同而有一定的差别袁这与图 圆 显示的结果 是基本一致的遥 以上仿真结果表明袁在网络拓扑结 构改变的情况下袁系统仍然可以很快地调节回平衡 位置遥 图 猿摇 向系统中加入一个智能体袁晕越 圆员 云蚤早援猿摇 粤凿凿 燥灶藻 皂燥则藻 葬早藻灶贼 贼燥 贼澡藻 枣燥则皂藻则 泽赠泽贼藻皂袁 晕越 圆员 渊葬冤智能体位移偏差曲线 渊遭冤智能体速度偏差曲线 图 源摇 晕越 圆员 时多智能体系统的响应曲线 云蚤早援源摇 砸藻泽责燥灶泽藻 糟怎则增藻泽 燥枣 贼澡藻 皂怎造贼蚤鄄葬早藻灶贼 泽赠泽贼藻皂袁 晕越 圆员 源摇 结束语 本文在包含原理的概念下考虑多智能体系统的 运动一致性问题遥 通过对系统重叠偏差方程进行扩 展尧为每个智能体对单独设计控制律尧再将结果整合 并收缩这样的过程袁可以实现原系统的一致性协调 控制遥 区别于之前的工作袁本文解决了在 圆 个运动 轴向上应用包含原理进行系统重叠分解的问题遥 文 中各智能体间距离相等的网型结构是有现实意义 的袁在自动车组的队形保持或多机器人系统的群集 控制中均有应用价值遥 另一方面袁不只是本文提到 的一致性问题袁基于置换包含原理的对对分解也同 样适用于处理更加复杂的控制算法以及网络结构的 动态变化遥 窑源苑圆窑 智 能 系 统 学 报摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇摇 第 怨 卷