正在加载图片...
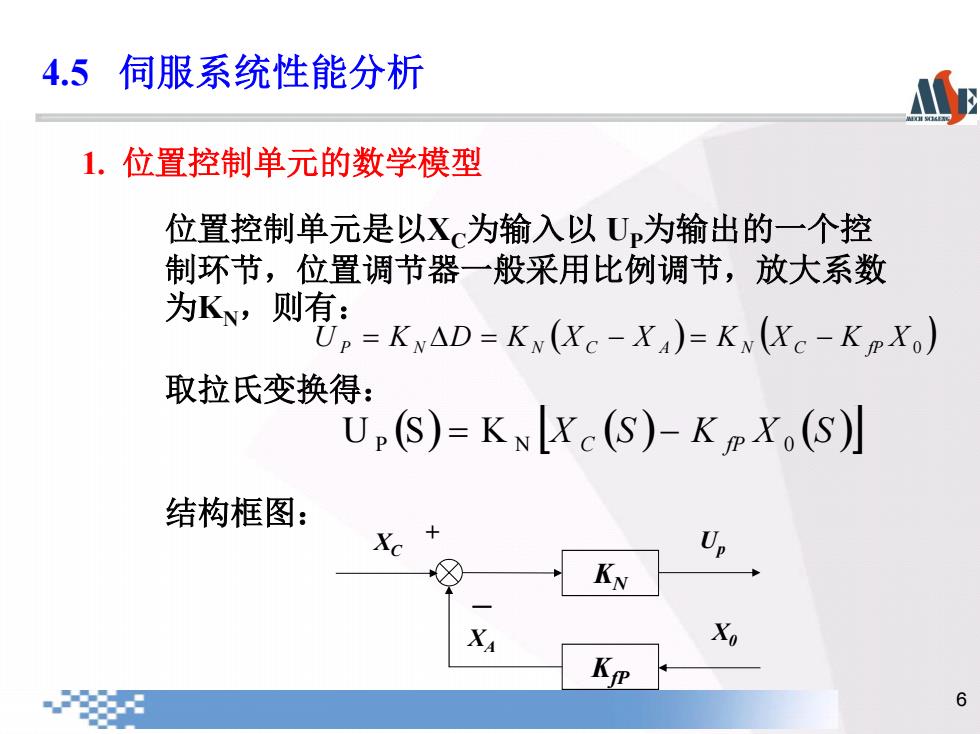
4.5伺服系统性能分析 1.位置控制单元的数学模型 位置控制单元是以Xc为输入以Up为输出的一个控 制环节,位置调节器一般采用比例调节,放大系数 为Kv,则有: =KxAD=Kx(Xc-X)=Kv(Xc-KpXo) 取拉氏变换得: US)=KNXc(S)-KPX(S月 结构框图: KN Xo Kr 6 6 1. 位置控制单元的数学模型 位置控制单元是以XC为输入以 UP为输出的一个控 制环节,位置调节器一般采用比例调节,放大系数 为KN,则有: 取拉氏变换得: 结构框图: ( ) ( ) U P = KN DD = KN X C - X A = KN X C - K fP X 0 ( ) X (S ) K X (S ) U P S = K N C - fP 0 KN KfP + - X X0 A XC Up 4.5 伺服系统性能分析