正在加载图片...
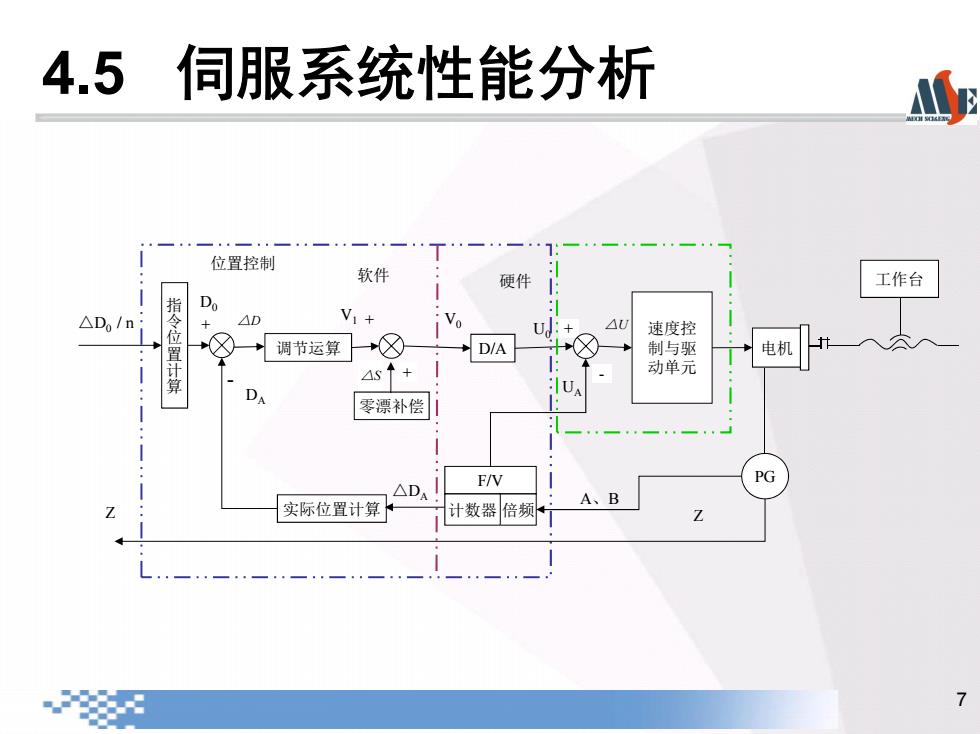
4.5 伺服系统性能分析 位置控制 软件 硬件 工作台 △Do/n 指令位 D AD V1+ U:+ △U 速度控 调节运算一+公 D/A (X) 制与驱 电机 4s↑+ 动单元 UA 零漂补偿山 F/V △D 实际位置计算 A、B 计数器倍频 77 + 调节运算 零漂补偿 硬件 速度控 制与驱 动单元 D/A 软件 位置控制 Z A、B D0 - + + - F/V 计数器 倍频 工作台 PG 电机 + DA V1 △S V0 U0 UA △D △U 实际位置计算 △DA 指令位置计算 △D0 / n Z 4.5 伺服系统性能分析