正在加载图片...
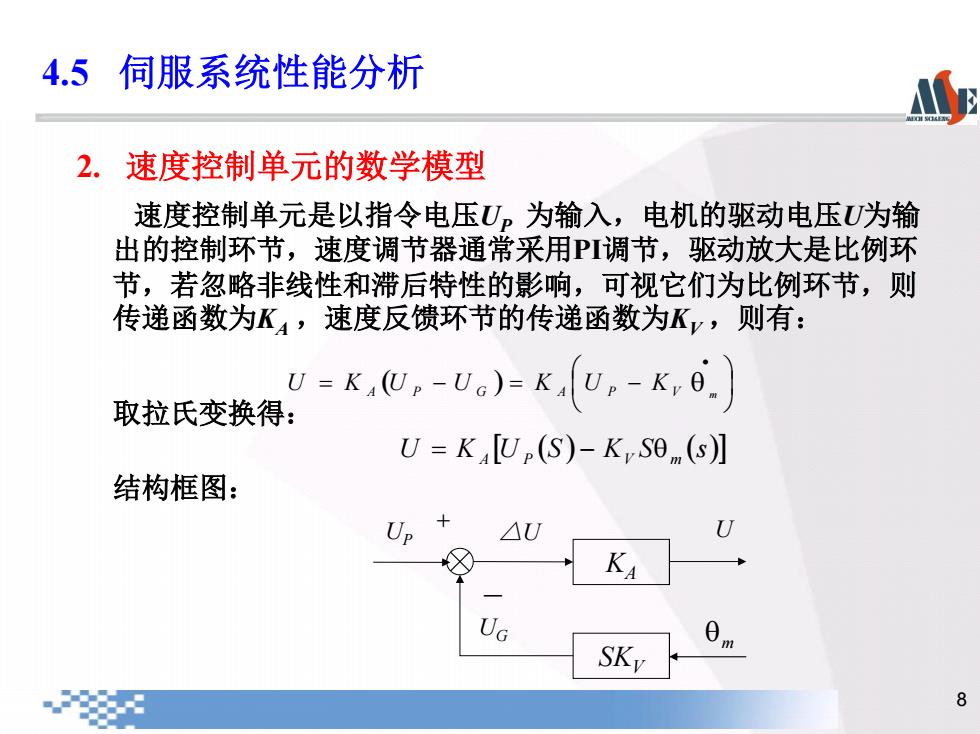
4.5伺服系统性能分析 2.速度控制单元的数学模型 速度控制单元是以指令电压Up为输入,电机的驱动电压U为输 出的控制环节,速度调节器通常采用P调节,驱动放大是比例环 节,若忽略非线性和滞后特性的影响,可视它们为比例环节,则 传递函数为K4,速度反馈环节的传递函数为Kv,则有: U=K,Up-UG)=KUp-K,0】 取拉氏变换 U=K4[Up(S)-KyS0m(s】 结构框图: Up △U KA SKv 8 8 2. 速度控制单元的数学模型 速度控制单元是以指令电压UP 为输入,电机的驱动电压U为输 出的控制环节,速度调节器通常采用PI调节,驱动放大是比例环 节,若忽略非线性和滞后特性的影响,可视它们为比例环节,则 传递函数为KA ,速度反馈环节的传递函数为KV ,则有: 取拉氏变换得: 结构框图: ( ) = - = - U K A U P U G K A U P KV m U K U (S ) K S (s) = A P - V m KA SKV + - UG UP U m △U 4.5 伺服系统性能分析