点击下载:吉林大学:《自动控制原理》课程电子教案(PPT课件)第六章 根轨迹法(2/2)
正在加载图片...
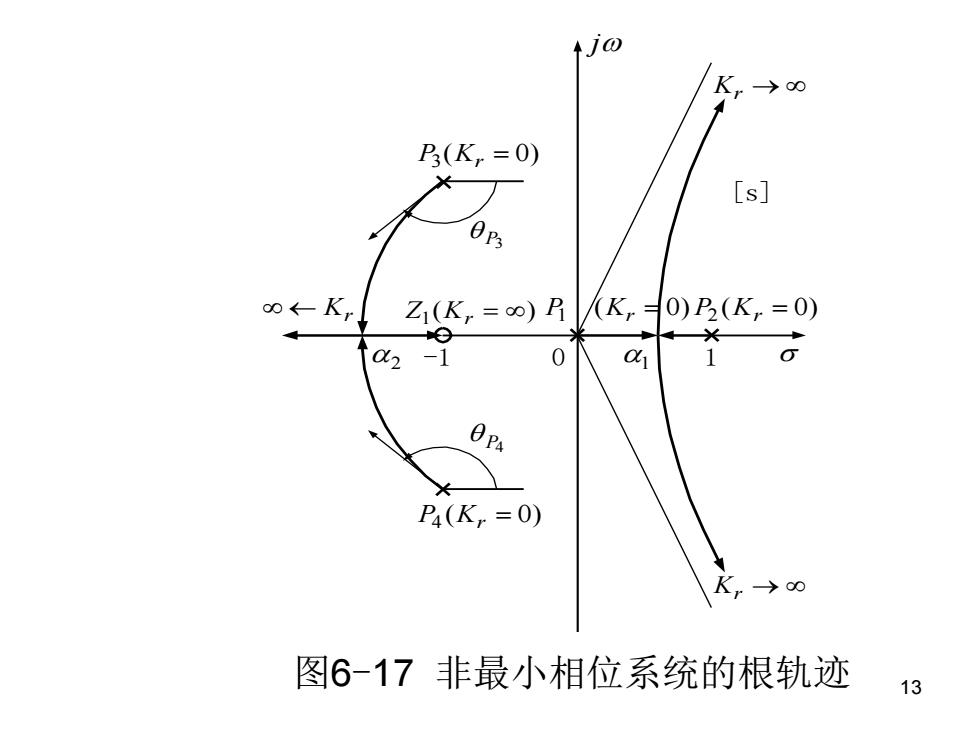
K,→0 乃(K,=0) [s] 0P3 ←-Kr Z1(K,=o)乃 /K,O)P(K,=0) 02 a OPA P4(K,=0) 图6-17非最小相位系统的根轨迹 1313 j [s] ( ) Z1 Kr = ( 0) P2 Kr = ( 0) P3 Kr = 2 -1 0 1 Kr → Kr 1 ( 0) P4 Kr = P3 P4 Kr → ( 0) P1 Kr = 图6-17 非最小相位系统的根轨迹
<<向上翻页
向下翻页>>
点击下载:吉林大学:《自动控制原理》课程电子教案(PPT课件)第六章 根轨迹法(2/2)
©2008-现在 cucdc.com 高等教育资讯网 版权所有