正在加载图片...
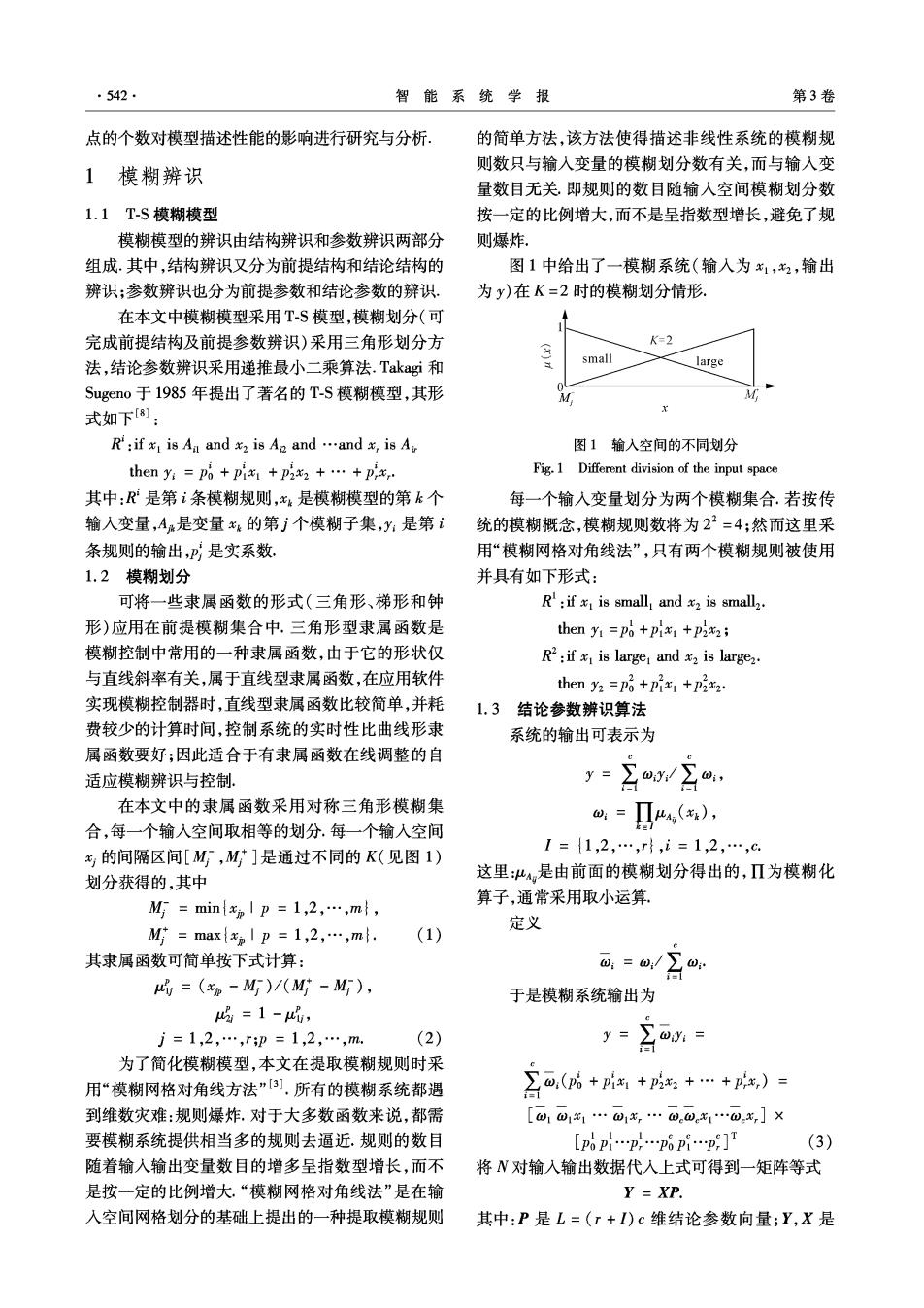
542. 智能系统学报 第3卷 点的个数对模型描述性能的影响进行研究与分析. 的简单方法,该方法使得描述非线性系统的模糊规 1模糊辨识 则数只与输入变量的模糊划分数有关,而与输入变 量数目无关即规则的数目随输入空间模糊划分数 1.1T-S模糊模型 按一定的比例增大,而不是呈指数型增长,避免了规 模糊模型的辨识由结构辨识和参数辨识两部分 则爆炸 组成.其中,结构辨识又分为前提结构和结论结构的 图1中给出了一模糊系统(输入为1,2,输出 辨识;参数辨识也分为前提参数和结论参数的辨识, 为y)在K=2时的模糊划分情形. 在本文中模糊模型采用T-S模型,模糊划分(可 完成前提结构及前提参数辨识)采用三角形划分方 K=2 small 法,结论参数辨识采用递推最小二乘算法.Takagi和 large Sugeno于1985年提出了著名的T-S模糊模型,其形 M 式如下: R':if x is Aa and x2 is An and..and x,is Ar 图1输入空间的不同划分 then yi =po pix +p2x2++p;x, Fig.1 Different division of the input space 其中:R是第i条模糊规则,xk是模糊模型的第k个 每一个输入变量划分为两个模糊集合.若按传 输入变量,4是变量x的第j个模糊子集,y:是第i 统的模糊概念,模糊规则数将为2=4:然而这里采 条规则的输出,卫是实系数 用“模糊网格对角线法”,只有两个模糊规则被使用 1.2模糊划分 并具有如下形式: 可将一些隶属函数的形式(三角形、梯形和钟 R':if is small and x2 is small2. 形)应用在前提模糊集合中,三角形型隶属函数是 then yi=po +pix +px2 模糊控制中常用的一种隶属函数,由于它的形状仅 R2:if x is large and x2 is largez. 与直线斜率有关,属于直线型隶属函数,在应用软件 then y2 =po +pix +pix 实现模糊控制器时,直线型隶属函数比较简单,并耗 1.3 结论参数辨识算法 费较少的计算时间,控制系统的实时性比曲线形隶 系统的输出可表示为 属函数要好;因此适合于有隶属函数在线调整的自 适应模糊辨识与控制. y= 在本文中的隶属函数采用对称三角形模糊集 4,=,(, 合,每一个输入空间取相等的划分.每一个输人空间 x的间隔区间[M,M]是通过不同的K(见图1) 1={1,2,…,r,i=1,2,…,c 划分获得的,其中 这里:w,是由前面的模糊划分得出的,Π为模糊化 M=min{xp|p=1,2,…,m, 算子,通常采用取小运算。 定义 Mg=maxp=1,2,…,m. (1) 其隶属函数可简单按下式计算: =(p-M)/(M-M), 于是模糊系统输出为 喝=1-, j=1,2,…,rp=1,2,…,m (2) y=名, 为了简化模糊模型,本文在提取模糊规则时采 用“模糊网格对角线方法”3).所有的模糊系统都遇 ∑a,(p6+pix1+p吃+…+px,)= 到维数灾难:规则爆炸,对于大多数函数来说,都需 [01D1x1…⊙1x,…00x1…ox,]X 要模糊系统提供相当多的规则去逼近.规则的数目 [p%pp…p6pip]T (3) 随着输入输出变量数目的增多呈指数型增长,而不 将V对输入输出数据代入上式可得到一矩阵等式 是按一定的比例增大.“模糊网格对角线法”是在输 Y=XP. 人空间网格划分的基础上提出的一种提取模糊规则 其中:P是L=(r+I)c维结论参数向量;Y,X是