正在加载图片...
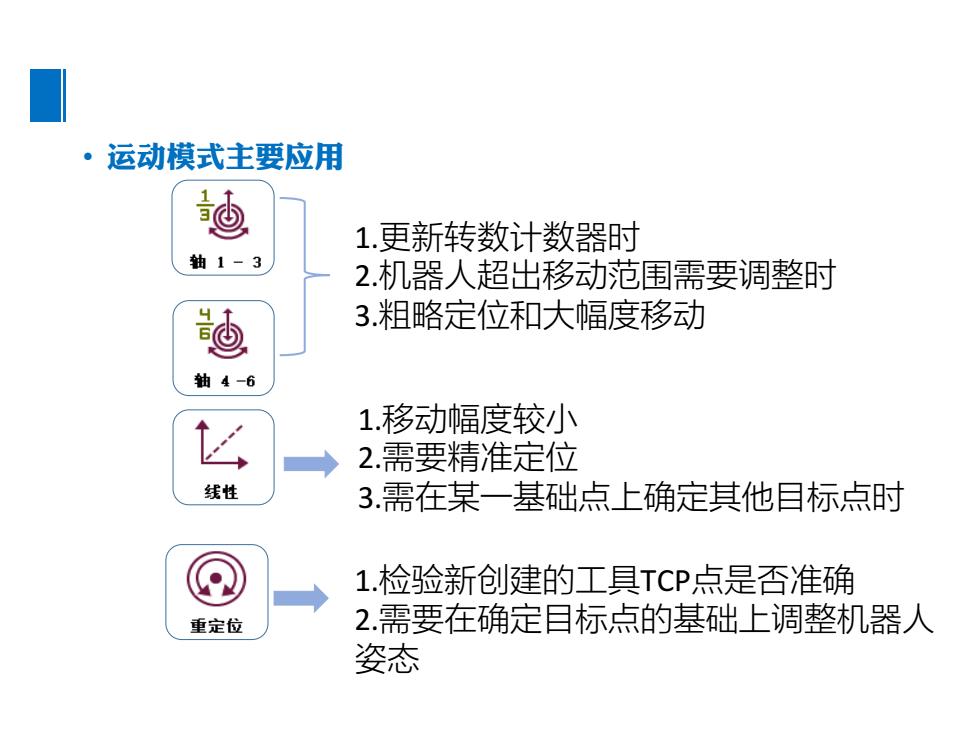
运动模式主要应用 越 1.更新转数计数器时 轴1-3 2.机器人超出移动范围需要调整时 3粗略定位和大幅度移动 轴4-6 1.移动幅度较小 2.需要精准定位 线性 3.需在某一基础点上确定其他目标点时 1.检验新创建的工具TCP点是否准确 重定位 2.需要在确定目标点的基础上调整机器人 姿态• 运动模式主要应用 1.更新转数计数器时 2.机器人超出移动范围需要调整时 3.粗略定位和大幅度移动 1.移动幅度较小 2.需要精准定位 3.需在某一基础点上确定其他目标点时 1.检验新创建的工具TCP点是否准确 2.需要在确定目标点的基础上调整机器人 姿态