正在加载图片...
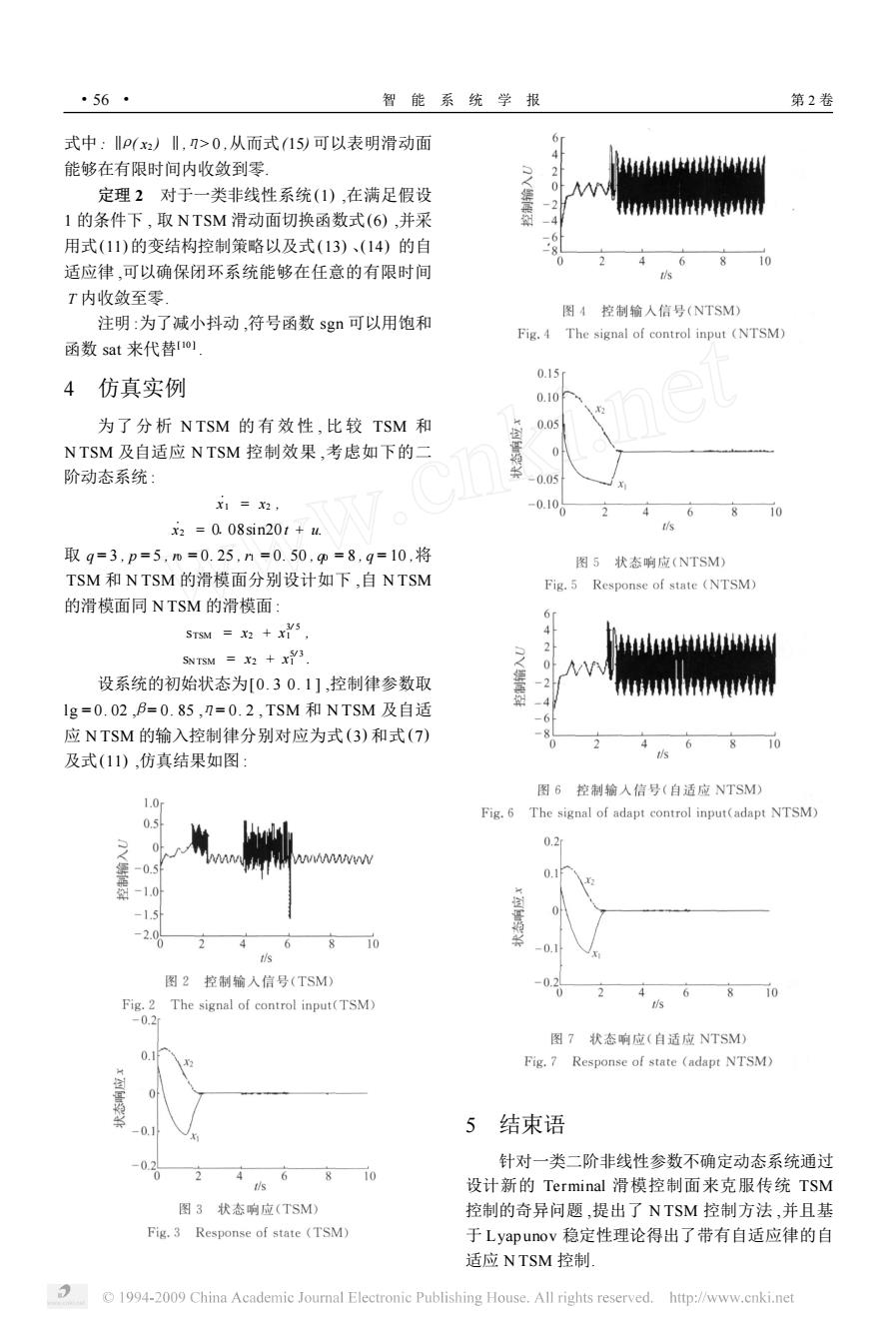
·56· 智能系统学报 第2卷 式中:‖P(x2)‖,>0,从而式(15)可以表明滑动面 61 能够在有限时间内收敛到零 Z04344 定理2对于一类非线性系统(1),在满足假设 0 2 fnnrrann 1的条件下,取NTSM滑动面切换函数式(6),并采 用式(11)的变结构控制策略以及式(13)、(14)的自 6 4 6 810 适应律,可以确保闭环系统能够在任意的有限时间 s T内收敛至零」 图4控制输人信号(NTSM) 注明:为了减小抖动,符号函数sgn可以用饱和 Fig.4 The signal of control input (NTSM) 函数sat来代替Io] 0.15 4仿真实例 0.10 为了分析NTSM的有效性,比较TSM和 0.05 NTSM及自适应NTSM控制效果,考虑如下的二 阶动态系统: -0.05 X1=x2, -0.106 4 6810 x2=0.08sin20t+u. s 取q=3,p=5,m=0.25,n=0.50,=8,g=10,将 图5状态响应(NTSM) TSM和NTSM的滑模面分别设计如下,自NTSM Fig.5 Response of state (NTSM) 的滑模面同NTSM的滑模面: 5sM=2+x, 4 2 SNTSM =X2+x3 0 设系统的初始状态为[0.30.1],控制律参数取 wwtwwwm lg=0.02,f=0.85,=0.2,TSM和NTSM及自适 应NTSM的输入控制律分别对应为式(3)和式(7) 6 810 及式(11),仿真结果如图: s 图6控制输人信号(自适应NTSM) 1.0 Fig.6 The signal of adapt control input(adapt NTSM) 0.5 0.2 wMMWW -0.5 -1.5 -2.0 6 810 tis 图2控制输入信号(TSM) -0.2 4 10 Fig.2 The signal of control input(TSM) s -0.2 图7状态响应(自适应NTSM) Fig.7 Response of state(adapt NTSM) 5结束语 6810 针对一类二阶非线性参数不确定动态系统通过 0 4 设计新的Terminal滑模控制面来克服传统TSM 图3状态响应(TSM) 控制的奇异问题,提出了NTSM控制方法,并且基 Fig.3 Response of state (TSM) 于Lyapunov稳定性理论得出了带有自适应律的自 适应NTSM控制 1994-2009 China Academic Journal Electronic Publishing House.All rights reserved.http://www.cnki.net式中 : ‖ρ( x2 ) ‖,η> 0 ,从而式(15) 可以表明滑动面 能够在有限时间内收敛到零. 定理 2 对于一类非线性系统(1) ,在满足假设 1 的条件下 , 取 N TSM 滑动面切换函数式(6) ,并采 用式(11) 的变结构控制策略以及式(13) 、(14) 的自 适应律 ,可以确保闭环系统能够在任意的有限时间 T 内收敛至零. 注明 :为了减小抖动 ,符号函数 sgn 可以用饱和 函数 sat 来代替[10 ] . 4 仿真实例 为了 分 析 N TSM 的 有 效 性 , 比 较 TSM 和 N TSM 及自适应 N TSM 控制效果 ,考虑如下的二 阶动态系统 : Ûx1 = x2 , Ûx2 = 0108sin20t + u. 取 q = 3 , p = 5 , r0 = 0. 25 , r1 = 0. 50 , q0 = 8 , q = 10 ,将 TSM 和 N TSM 的滑模面分别设计如下 ,自 N TSM 的滑模面同 N TSM 的滑模面 : sTSM = x2 + x 3/ 5 1 , sN TSM = x2 + x 5/ 3 1 . 设系统的初始状态为[ 0. 3 0. 1 ] ,控制律参数取 lg = 0. 02 ,β= 0. 85 ,η= 0. 2 , TSM 和 N TSM 及自适 应 N TSM 的输入控制律分别对应为式 (3) 和式 (7) 及式(11) ,仿真结果如图 : 5 结束语 针对一类二阶非线性参数不确定动态系统通过 设计新的 Terminal 滑模控制面来克服传统 TSM 控制的奇异问题 ,提出了 N TSM 控制方法 ,并且基 于 Lyap unov 稳定性理论得出了带有自适应律的自 适应 N TSM 控制. ·56 · 智 能 系 统 学 报 第 2 卷