正在加载图片...
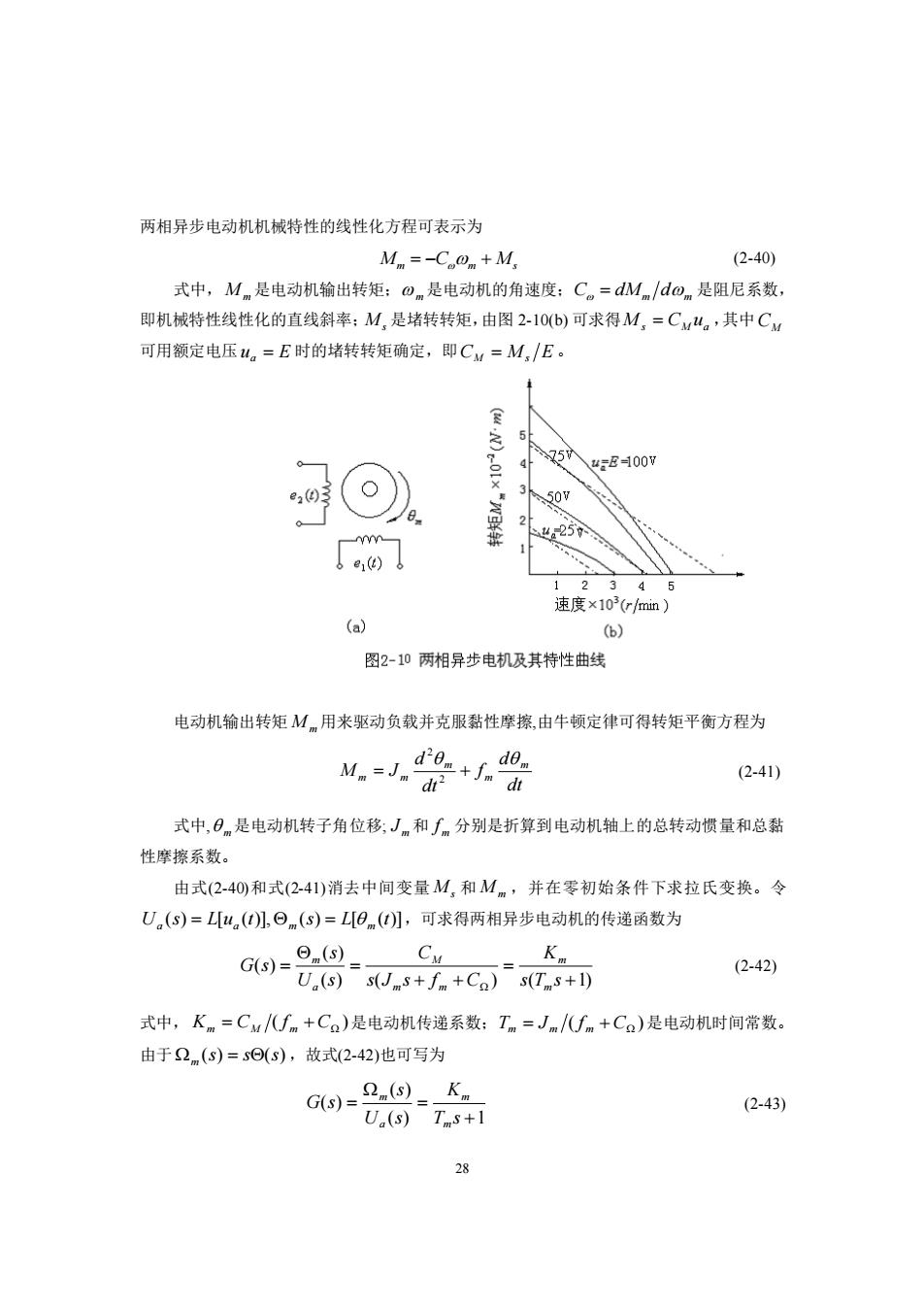
两相异步电动机机械特性的线性化方程可表示为 M=-Co@m+M, (2-40) 式中,Mn是电动机输出转矩:om是电动机的角速度:C。=dM/dom是阻尼系数, 即机械特性线性化的直线斜率:M,是堵转转矩,由图2-10(b)可求得M,=Cy4。,其中Cy 可用额定电压山。=E时的堵转转矩确定,即CM=M,/E。 75 8100 507 25分 ( 速度 (a) 图2-10两相异步电机及其特性曲线 电动机输出转矩M.用来驱动负载并克服黏性摩擦,由牛顿定律可得转矩平衡方程为 (2-41) d d 式中,日是电动机转子角位移;J和厂分别是折算到电动机轴上的总转动惯量和总黏 性摩擦系数。 由式(2-40和式(241)消去中间变量M,和M.,并在零初始条件下求拉氏变换。令 U.(s)=u,1O(s)=L0(),可求得两相异步电动机的传递函数为 a0-88u元G可 (2-42) 式中,Km=Cy/f。+C。)是电动机传递系数:Tm=Jmfm+Ca)是电动机时间常数。 由于2(s)=sO(s),故式(242)也可写为 G-2 U.(s)T.s+1 (2-43) 28 两相异步电动机机械特性的线性化方程可表示为 M C M m m s = − + (2-40) 式中, M m 是电动机输出转矩; m 是电动机的角速度; C dM d = m m 是阻尼系数, 即机械特性线性化的直线斜率; Ms 是堵转转矩,由图 2-10(b) 可求得 Ms = CM ua ,其中 CM 可用额定电压 ua = E 时的堵转转矩确定,即 CM = Ms E 。 电动机输出转矩 M m 用来驱动负载并克服黏性摩擦,由牛顿定律可得转矩平衡方程为 dt d f dt d M J m m m m m = + 2 2 (2-41) 式中, m 是电动机转子角位移; m J 和 m f 分别是折算到电动机轴上的总转动惯量和总黏 性摩擦系数。 由式(2-40)和式(2-41)消去中间变量 Ms 和 M m ,并在零初始条件下求拉氏变换。令 U (s) L[u (t)], (s) L[ (t)] a = a m = m ,可求得两相异步电动机的传递函数为 ( ) ( ) ( 1) ( ) ( ) + = + + = = s T s K s J s f C C U s s G s m m m m M a m (2-42) 式中, ( ) = +C K C f m M m 是电动机传递系数; ( ) = +C T J f m m m 是电动机时间常数。 由于 (s) s (s) m = ,故式(2-42)也可写为 ( ) 1 ( ) ( ) + = = T s K U s s G s m m a m (2-43)