正在加载图片...
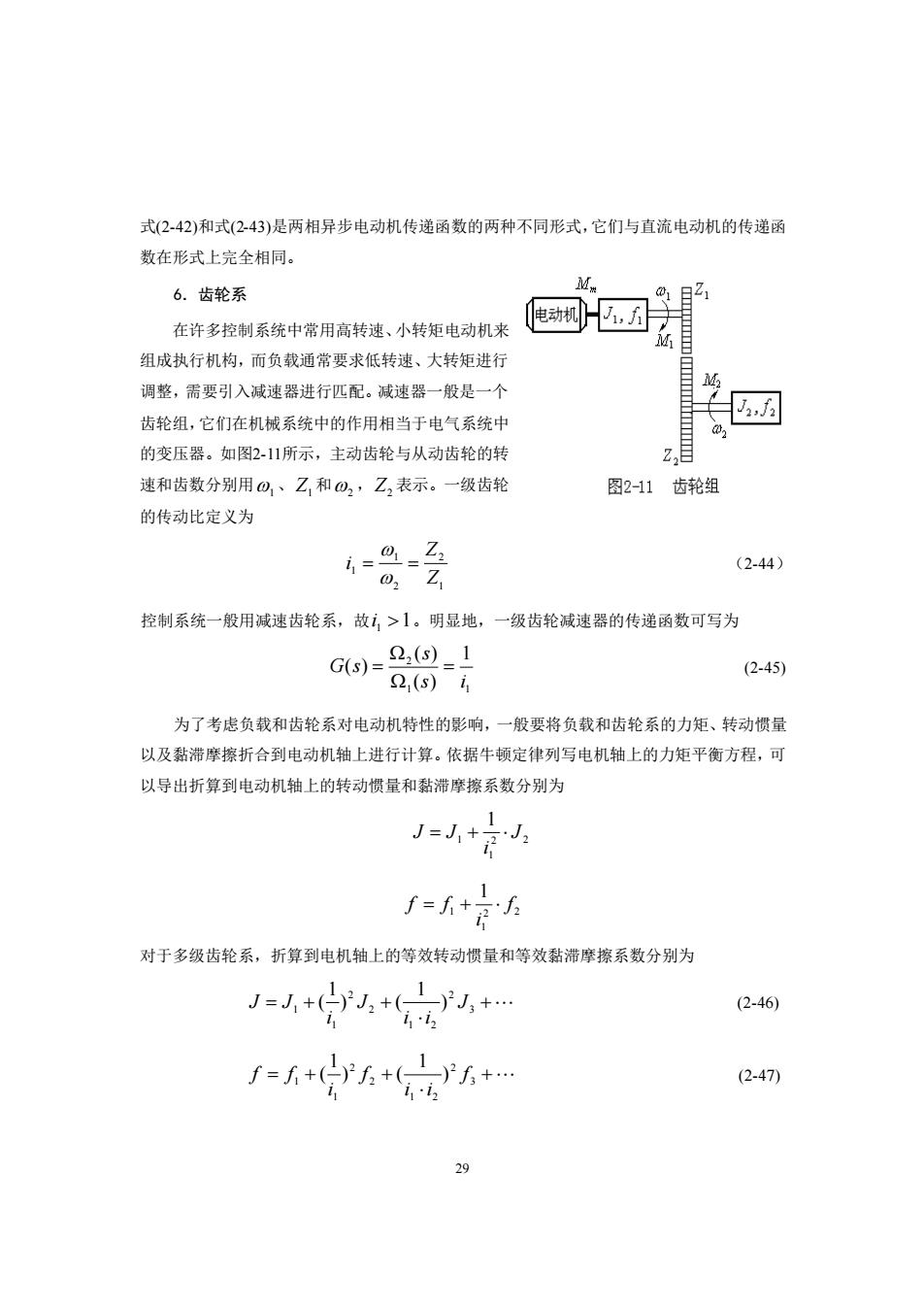
式(2-42)和式(243)是两相异步电动机传递函数的两种不同形式,它们与直流电动机的传递函 数在形式上完全相同。 6.齿轮系 在许多控制系统中常用高转速、小转矩电动机来 电动枫,于 组成执行机构,而负载通常要求低转速、大转矩进行 调整,需要引入减速器进行匹配。减速器一般是一个 齿轮组,它们在机械系统中的作用相当于电气系统中 的变压器。如图2-11所示,主动齿轮与从动齿轮的转 z,目 速和齿数分别用0、乙,和0,乙2表示。一级齿轮 图2-11齿轮组 的传动比定义为 4会 (2-44) 控制系统一般用减速齿轮系,故1>1。明显地,一级齿轮减速器的传递函数可写为 22(s)_1 G(s)()h (2-45) 为了考虑负载和齿轮系对电动机特性的影响,一般要将负载和齿轮系的力矩、转动惯量 以及黏滞摩擦折合到电动机轴上进行计算。依据牛顿定律列写电机轴上的力矩平衡方程,可 以导出折算到电动机轴上的转动惯量和黏滞摩擦系数分别为 =+ f=f+京万 对于多级齿轮系,折算到电机轴上的等效转动惯量和等效黏滞摩擦系数分别为 J=+白+ -)}2J3+… (2-46 。 =+6+6+ (2-47)29 式(2-42)和式(2-43)是两相异步电动机传递函数的两种不同形式,它们与直流电动机的传递函 数在形式上完全相同。 6.齿轮系 在许多控制系统中常用高转速、小转矩电动机来 组成执行机构,而负载通常要求低转速、大转矩进行 调整,需要引入减速器进行匹配。减速器一般是一个 齿轮组,它们在机械系统中的作用相当于电气系统中 的变压器。如图2-11所示,主动齿轮与从动齿轮的转 速和齿数分别用 1、Z1 和 2 ,Z2 表示。一级齿轮 的传动比定义为 1 2 2 1 1 Z Z i = = (2-44) 控制系统一般用减速齿轮系,故 i 1 1 。明显地,一级齿轮减速器的传递函数可写为 1 1 2 1 ( ) ( ) ( ) s i s G s = = (2-45) 为了考虑负载和齿轮系对电动机特性的影响,一般要将负载和齿轮系的力矩、转动惯量 以及黏滞摩擦折合到电动机轴上进行计算。依据牛顿定律列写电机轴上的力矩平衡方程,可 以导出折算到电动机轴上的转动惯量和黏滞摩擦系数分别为 2 2 1 1 1 J i J = J + 2 2 1 1 1 f i f = f + 对于多级齿轮系,折算到电机轴上的等效转动惯量和等效黏滞摩擦系数分别为 + = + + 3 2 1 2 2 2 1 1 ) 1 ) ( 1 ( J i i J i J J (2-46) + = + + 3 2 1 2 2 2 1 1 ) 1 ) ( 1 ( f i i f i f f (2-47)