正在加载图片...
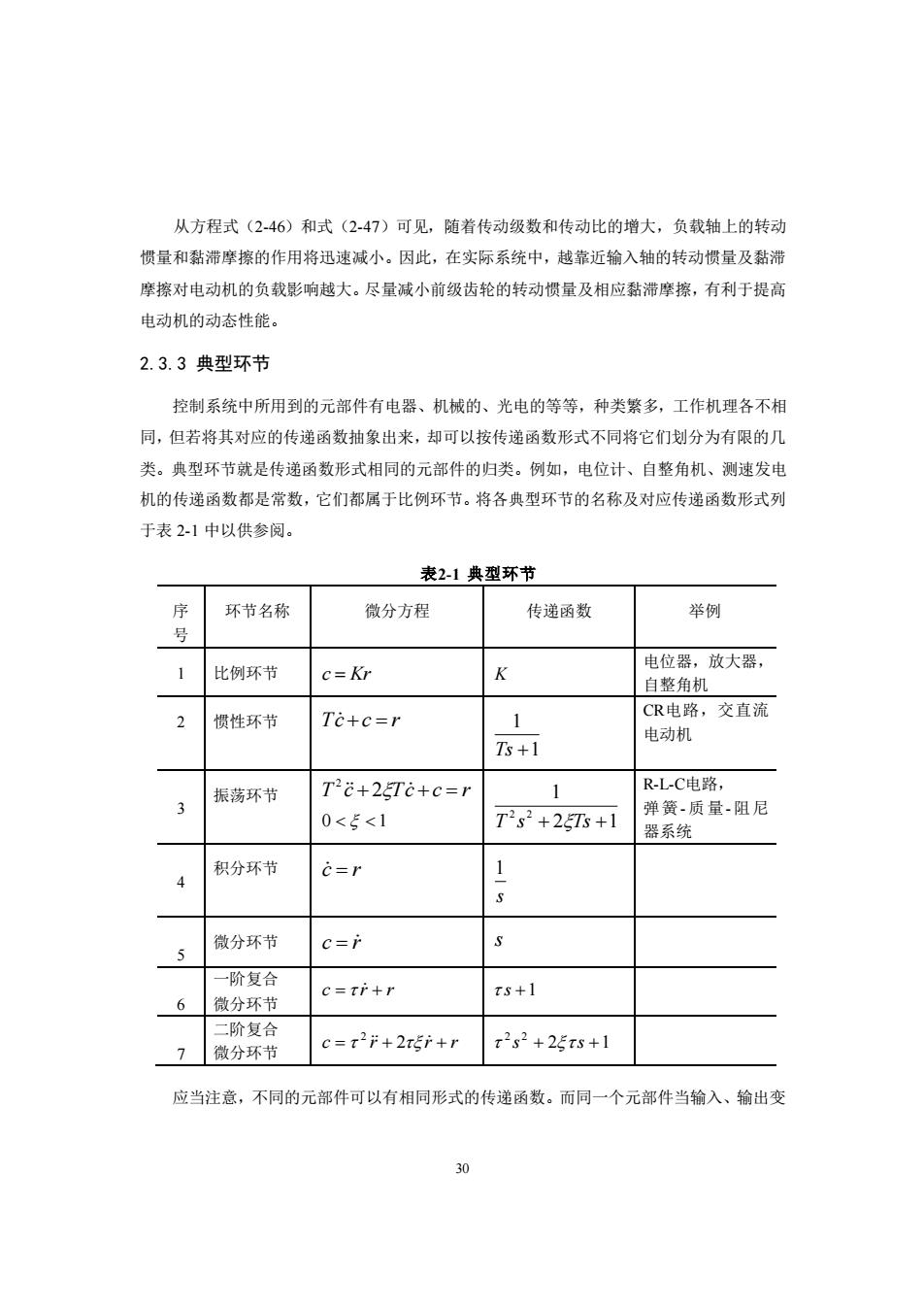
从方程式(2-46)和式(247)可见,随者传动级数和传动比的增大,负载轴上的转动 惯量和黏滞摩擦的作用将迅速减小。因此,在实际系统中,越靠近输入轴的转动惯量及黏滞 摩擦对电动机的负载影响越大。尽量减小前级齿轮的转动惯量及相应黏滞摩擦,有利于提高 电动机的动态性能。 2.3.3典型环节 控制系统中所用到的元部件有电器、机械的、光电的等等,种类繁多,工作机理各不相 同,但若将其对应的传递函数抽象出来,却可以按传递函数形式不同将它们划分为有限的几 类。典型环节就是传递函数形式相同的元部件的归类。例如,电位计、自整角机、测速发电 机的传递函数都是常数,它们都属于比例环节。将各典型环节的名称及对应传递函数形式列 于表2-1中以供参阅。 表21典型环节 序 环节名称 微分方程 传递函数 举例 1 比例环节 c=Kr K 电位器,放大器, 自整角机 2 惯性环节 Te+c=r CR电路,交直流 1 电动机 5+1 振荡环节 Tc+2Te+c=r 1 R-L-C电路, 3 0<E<1 T2s2+25T+1 弹簧-质量-阻尼 器系统 积分环节 c=r 1 4 微分环节 c=i 5 一价有合 c=Tr+r ts+l 微分环节 二阶复 c=T-i+2tEr+r x2s2+25xs+1 7微分环节 应当注意,不同的元部件可以有相同形式的传递函数。而同一个元部件当输入、输出变 0 30 从方程式(2-46)和式(2-47)可见,随着传动级数和传动比的增大,负载轴上的转动 惯量和黏滞摩擦的作用将迅速减小。因此,在实际系统中,越靠近输入轴的转动惯量及黏滞 摩擦对电动机的负载影响越大。尽量减小前级齿轮的转动惯量及相应黏滞摩擦,有利于提高 电动机的动态性能。 2.3.3 典型环节 控制系统中所用到的元部件有电器、机械的、光电的等等,种类繁多,工作机理各不相 同,但若将其对应的传递函数抽象出来,却可以按传递函数形式不同将它们划分为有限的几 类。典型环节就是传递函数形式相同的元部件的归类。例如,电位计、自整角机、测速发电 机的传递函数都是常数,它们都属于比例环节。将各典型环节的名称及对应传递函数形式列 于表 2-1 中以供参阅。 表2-1 典型环节 序 号 环节名称 微分方程 传递函数 举例 1 比例环节 c Kr = K 电位器,放大器, 自整角机 2 惯性环节 Tc +c = r 1 1 Ts + CR电路,交直流 电动机 3 振荡环节 T c + 2Tc + c = r 2 0 1 2 1 1 2 2 T s + Ts + R-L-C电路, 弹簧- 质量- 阻尼 器系统 4 积分环节 c = r s 1 5 微分环节 c = r s 6 一阶复合 微分环节 c = r + r s +1 7 二阶复合 微分环节 c = r + 2 r + r 2 2 1 2 2 s + s + 应当注意,不同的元部件可以有相同形式的传递函数。而同一个元部件当输入、输出变