正在加载图片...
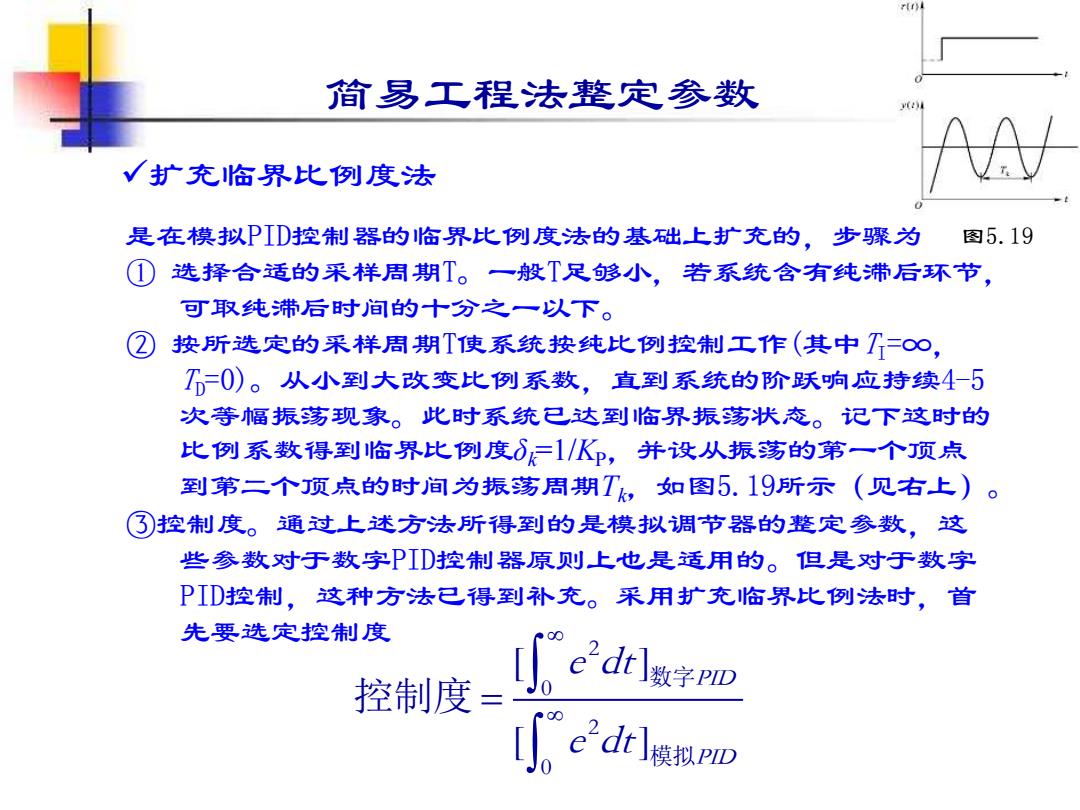
》4 简易工程法整定参数 √扩充临界比例度法 是在模拟PID控制器的临界比例度法的基础上扩充的,步骤为 图5.19 ①选择合适的采样周期T。一般T足够小,若系统含有纯滞后环节, 可取纯滞后时间的十分之一以下。 ② 按所选定的采样周期T使系统按纯比例控制工作(其中T=∞, T0)。从小到大改变比例系数,直到系统的阶跃响应持续4-5 次等幅振荡现象。此时系统已达到临界振荡状态。记下这时的 比例系数得到临界比例度δ1/K,并设从振荡的第一个顶点 到第二个顶点的时间为振荡周期T,如图5.19所示(见右上)。 了控制度。通过上述方法所得到的是模拟调节器的整定参数,这 些参数对于数字PID控制器原则上也是适用的。但是对于数字 PID控制,这种方法已得到补充。采用扩充临界比例法时,首 先要选定控制度 edl数字m 控制度 [edrl模数n简易工程法整定参数 ✓扩充临界比例度法 是在模拟PID控制器的临界比例度法的基础上扩充的,步骤为 ① 选择合适的采样周期T。一般T足够小,若系统含有纯滞后环节, 可取纯滞后时间的十分之一以下。 ② 按所选定的采样周期T使系统按纯比例控制工作(其中TI=∞ , TD=0)。从小到大改变比例系数,直到系统的阶跃响应持续4-5 次等幅振荡现象。此时系统已达到临界振荡状态。记下这时的 比例系数得到临界比例度δk=1/KP,并设从振荡的第一个顶点 到第二个顶点的时间为振荡周期Tk,如图5.19所示(见右上)。 ③控制度。通过上述方法所得到的是模拟调节器的整定参数,这 些参数对于数字PID控制器原则上也是适用的。但是对于数字 PID控制,这种方法已得到补充。采用扩充临界比例法时,首 先要选定控制度 = 数字 模拟 控制度 2 0 2 0 [ ] [ ] PID PID e dt e dt 图5.19