正在加载图片...
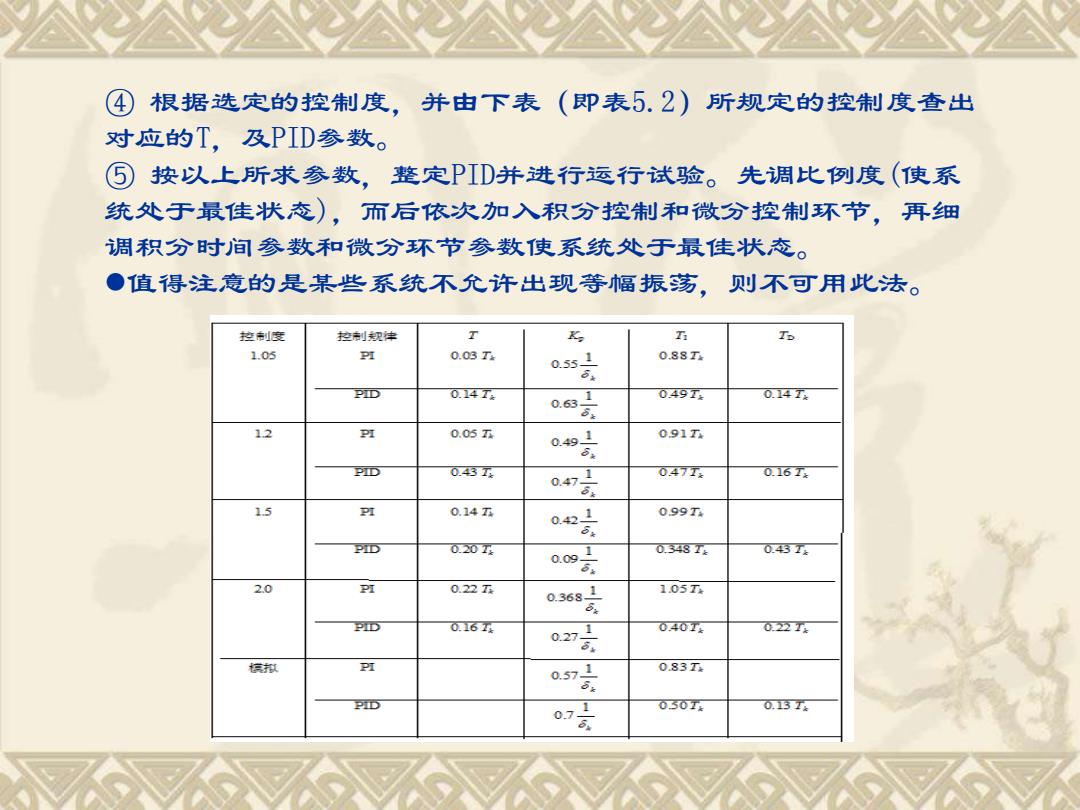
④ 根据选定的控制度,并由下表(即表5.2)」 所规定的控制度查出 对应的T,及PID参数。 ⑤按以上所求参数, 整定PID并进行运行试验。先调比例度(使系 统处于最佳状态),而后依次加入积分控制和微分控制环节,再细 调积分时间参数和微分环节参数使系统处于最佳状态。 ●值得注意的是某些系统不允许出现等幅振荡,则不可用此法。 控制度 控制规律 T K h To 1.05 P到 0.03T 053 0.88T 6 PID 014T2 0631 049T 0.14T 56 12 PI 0.05T 0491 091T 5 PID 043T 0.471 047T2 0.16Tx 8x 1.5 PI 0.14五 0421 099T 54 PID 020Tk 009 048T2 0.43Tx 6 2.0 PI 0.22T 0.3681 105T PID 01614 0克 040Tx 022T4 棕扣 P可 0.571 0.83T4 PiD 071 050T4 0.13T4④ 根据选定的控制度,并由下表(即表5.2)所规定的控制度查出 对应的T,及PID参数。 ⑤ 按以上所求参数,整定PID并进行运行试验。先调比例度(使系 统处于最佳状态),而后依次加入积分控制和微分控制环节,再细 调积分时间参数和微分环节参数使系统处于最佳状态。 ⚫值得注意的是某些系统不允许出现等幅振荡,则不可用此法