正在加载图片...
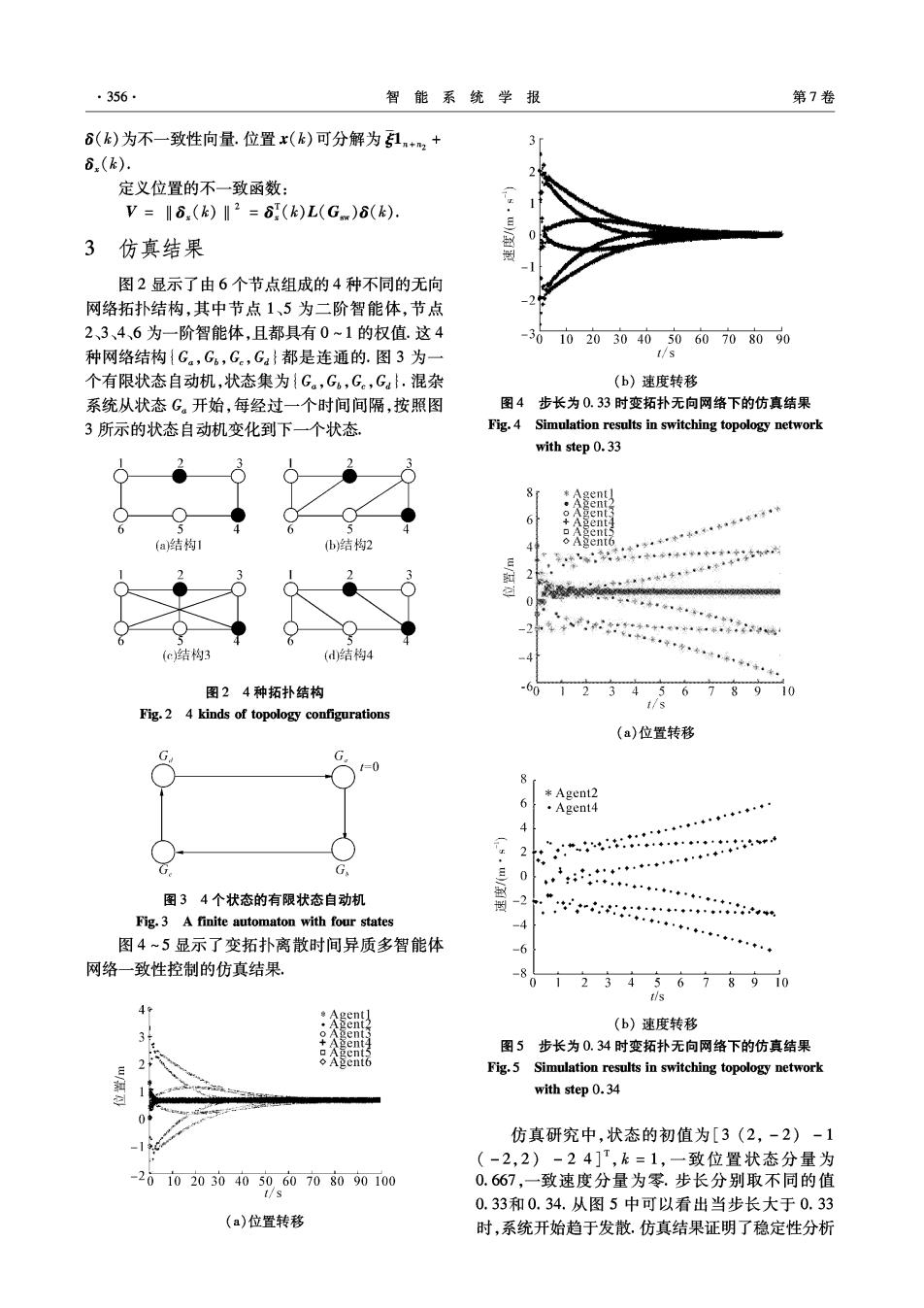
·356 智能系统学报 第7卷 6(k)为不一致性向量.位置x(k)可分解为1+2+ 6.(k). 定义位置的不一致函数: V=I6.(k)‖2=(k)L(G)6(k). 3仿真结果 图2显示了由6个节点组成的4种不同的无向 网络拓扑结构,其中节点1、5为二阶智能体,节点 2、3、4、6为一阶智能体,且都具有0~1的权值.这4 -30102030405060708090 种网络结构{G.,Gb,Ge,Ga}都是连通的.图3为一 t/s 个有限状态自动机,状态集为{Ga,G6,G。,Ga.混杂 (b)速度转移 系统从状态G。开始,每经过一个时间间隔,按照图 图4步长为0.33时变拓扑无向网络下的仿真结果 3所示的状态自动机变化到下一个状态 Fig.4 Simulation results in switching topology network with step 0.33 6 nt (a)结构 b)结构2 2 0 -2… (c结构3 (d)结构4 图24种拓扑结构 -60 12345678910 t/s Fig.2 4 kinds of topology configurations (a)位置转移 G =0 8 t *Agent2 6 … ·Agent4 2+ G G 0 图34个状态的有限状态自动机 Fig.3 A finite automaton with four states -4 ,””◆女*…·◆,。,心◆◆·$ 图4~5显示了变拓扑离散时间异质多智能体 -6 网络一致性控制的仿真结果. -8 01 2345678910 TIs 4 (b)速度转移 图5步长为0.34时变拓扑无向网络下的仿真结果 ◇A2ent6 Fig.5 Simulation results in switching topology network with step 0.34 仿真研究中,状态的初值为[3(2,-2)-1 (-2,2)-24]T,k=1,一致位置状态分量为 -20102030405060708090100 0.667,一致速度分量为零.步长分别取不同的值 I/s 0.33和0.34.从图5中可以看出当步长大于0.33 (a)位置转移 时,系统开始趋于发散.仿真结果证明了稳定性分析