正在加载图片...
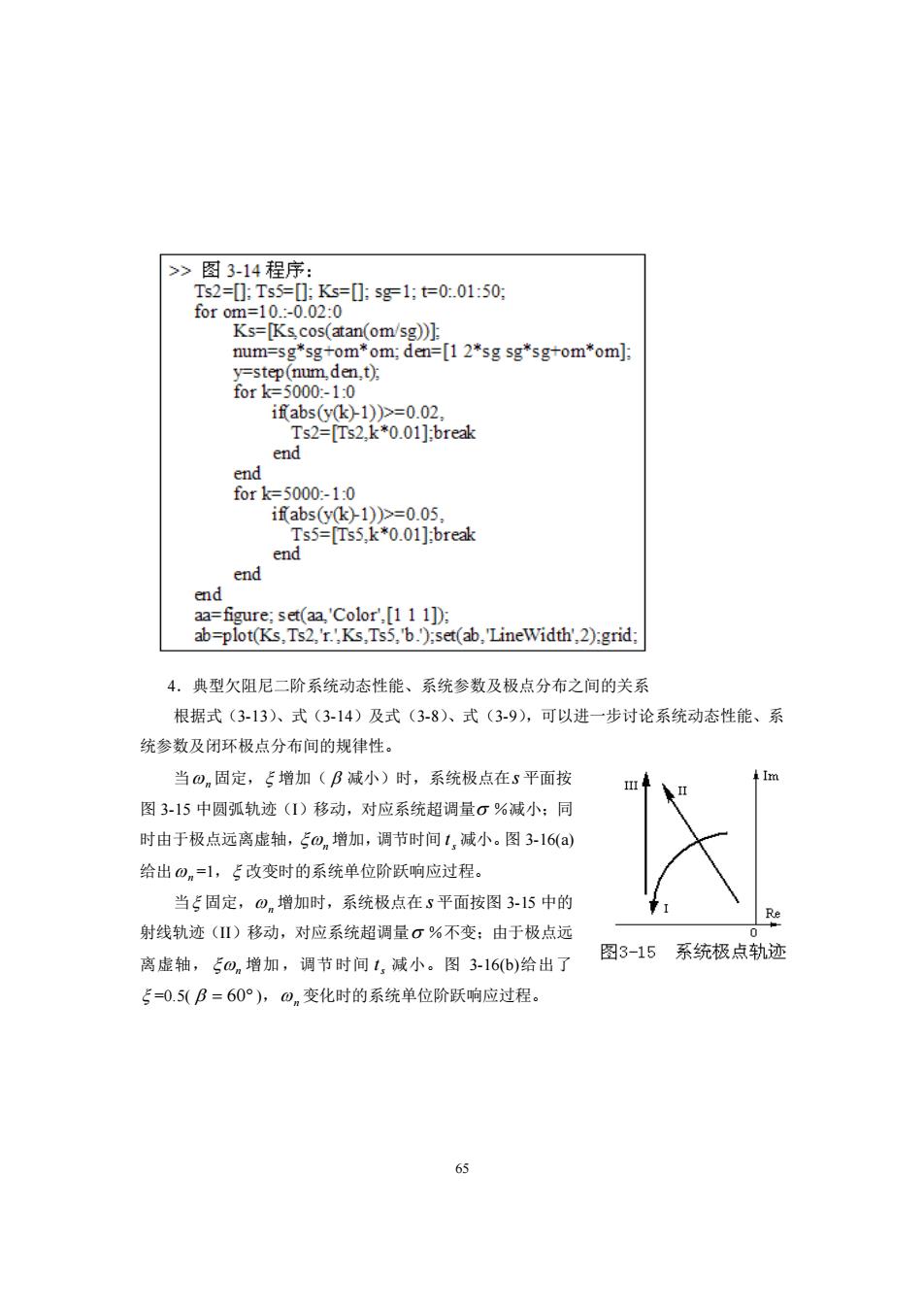
>>图3-14程序 Ts2=0Ts5=0:Ks=0:sg1:t0.01:50: om om:don-[12mom num-sden.() 6800 end2.1 if abs(y(k)1))>=0.02 or k50-1 ifabs(v(k1))>=005 s5=[Ts5,k*0.01]:break en end end set(aa'Co1o「1111 ab=plot(Ks.Ts2.r.Ks.Ts5.b.):set(ab.LineWidth.2):grid: 4.典型欠阻尼二阶系统动态性能、系统参数及极点分布之间的关系 根据式(3-13、式(314)及式(3-8)、式(3-9),可以进一步讨论系统动态性能、系 统参数及闭环极点分布间的规律性。 当0,固定,5增加(B减小)时,系统极点在5平面按 图3-15中圆弧轨迹(1)移动,对应系统超调量σ%减小:同 时由于极点远离虚轴,o,增加,调节时间1,减小。图3-16(a 给出0,=1,5改变时的系统单位阶跃响应过程。 当5周定,o,增加时,系统极点在s平面按图3-15中的 射线轨迹(1)移动,对应系统超调量。%不变:由于极点远 离虚轴,50n增加,调节时间1,减小。图316b)给出了 图3-15系统极点轨迹 5=0.5(B=60°),0n变化时的系统单位阶跃响应过程 65 4.典型欠阻尼二阶系统动态性能、系统参数及极点分布之间的关系 根据式(3-13)、式(3-14)及式(3-8)、式(3-9),可以进一步讨论系统动态性能、系 统参数及闭环极点分布间的规律性。 当 n 固定, 增加( 减小)时,系统极点在 s 平面按 图 3-15 中圆弧轨迹(I)移动,对应系统超调量 %减小;同 时由于极点远离虚轴, n 增加,调节时间 s t 减小。图 3-16(a) 给出 n =1, 改变时的系统单位阶跃响应过程。 当 固定, n 增加时,系统极点在 s 平面按图 3-15 中的 射线轨迹(II)移动,对应系统超调量 %不变;由于极点远 离虚轴, n 增加,调节时间 s t 减小。图 3-16(b)给出了 =0.5( = 60 ),n 变化时的系统单位阶跃响应过程