正在加载图片...
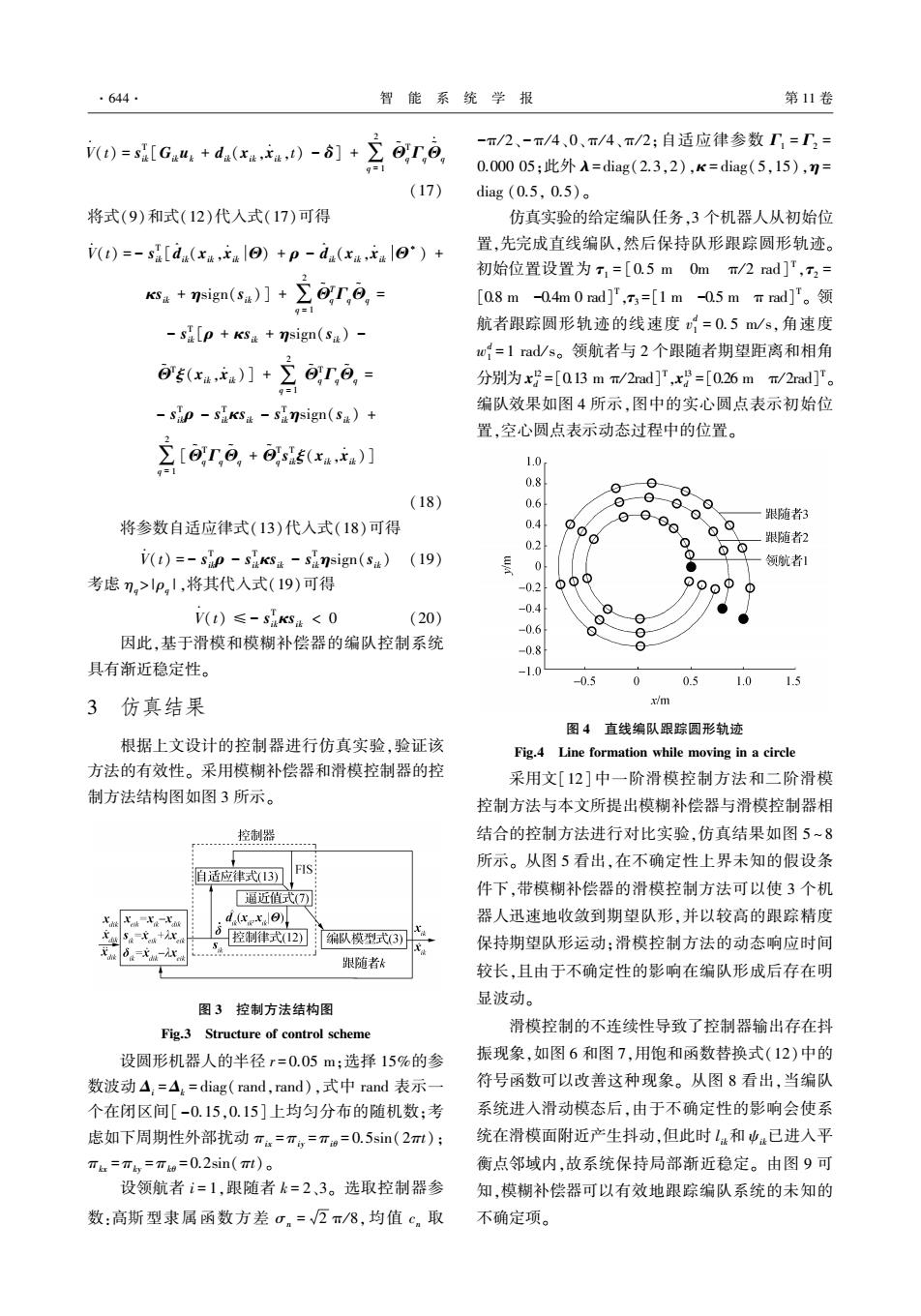
·644. 智能系统学报 第11卷 V(t)=s[G4u+d4(xt,x4,t)-6]+】 -T/2、-/4、0、/4、π/2;自适应律参数T,=T2= 0.00005:此外入=diag(2.3,2),k=diag(5,15),7= (17) diag(0.5,0.5)。 将式(9)和式(12)代入式(17)可得 仿真实验的给定编队任务,3个机器人从初始位 V(t)=-s[d4(xk,x|⊙)+p-d4(x,x4l⊙°)+ 置,先完成直线编队,然后保持队形跟踪圆形轨迹。 初始位置设置为T,=[0.5m0m/2rad],T2= Kk+sign(sa)]+∑0r,⑥,= [0.8m-0.4m0ad]',x=[1m-0.5mTad]'。领 -s[p +ksa +msign(sa)- 航者跟踪圆形轨迹的线速度=0.5m/s,角速度 w=1rad/s。领航者与2个跟随者期望距离和相角 5(x4)】+∑or,⑧,= 分别为x2=[013mπ/2ad]',x=[0.26mT/2ad]'。 g=1 -sup saksa -sinsign(sa)+ 编队效果如图4所示,图中的实心圆点表示初始位 置,空心圆点表示动态过程中的位置。 豆[8r0+o】 1.0 0.8 0 0- (18) 0.6 00 跟随者3 将参数自适应律式(13)代入式(18)可得 0.4 03 ,跟随者2 V(t)=-sap -saksa -sansign(sa)(19) ① 09 0 一领航者1 考虑nm>lp,I,将其代入式(19)可得 -0.2 000 P0o90 -0.4 V(t)≤-skst<0 (20) ● ● -0.6 0 因此,基于滑模和模糊补偿器的编队控制系统 -0.8 0 具有渐近稳定性。 -1.0 -0.5 0 0.5 1.0 1.5 3仿真结果 x/m 图4直线编队跟踪圆形轨迹 根据上文设计的控制器进行仿真实验,验证该 Fig.4 Line formation while moving in a circle 方法的有效性。采用模糊补偿器和滑模控制器的控 采用文「12]中一阶滑模控制方法和二阶滑模 制方法结构图如图3所示。 控制方法与本文所提出模糊补偿器与滑模控制器相 控制器 结合的控制方法进行对比实验,仿真结果如图5~8 所示。从图5看出,在不确定性上界未知的假设条 佰适应律式(13) FIS 逼近值式(7) 件下,带模糊补偿器的滑模控制方法可以使3个机 xx-xo d(xx) 器人迅速地收敛到期望队形,并以较高的跟踪精度 ò控制律式2) 编队模型式(3) 保持期望队形运动:滑模控制方法的动态响应时间 跟随者k 较长,且由于不确定性的影响在编队形成后存在明 显波动。 图3控制方法结构图 Fig.3 Structure of control scheme 滑模控制的不连续性导致了控制器输出存在抖 设圆形机器人的半径r=0.05m:选择15%的参 振现象,如图6和图7,用饱和函数替换式(12)中的 数波动△,=△:=diag(rand,rand),式中rand表示一 符号函数可以改善这种现象。从图8看出,当编队 个在闭区间[-0.15,0.15]上均匀分布的随机数;考 系统进入滑动模态后,由于不确定性的影响会使系 虑如下周期性外部扰动T.=T,=πa=0.5sin(2mt); 统在滑模面附近产生抖动,但此时L和山已进入平 T =Tby=TKo=0.2sin(mt)o 衡点邻域内,故系统保持局部渐近稳定。由图9可 设领航者i=1,跟随者k=2、3。选取控制器参 知,模糊补偿器可以有效地跟踪编队系统的未知的 数:高斯型隶属函数方差σ,=√2π/8,均值c,取不确定项。V · (t) = s T ik[Gikuk + dik(xik,x · ik,t) - δ · ] + ∑ 2 q = 1 Θ ~ T qΓqΘ ·~ q (17) 将式(9)和式(12)代入式(17)可得 V · (t) = - s T ik[d ^ ik(xik,x · ik Θ) + ρ - d ^ ik(xik,x · ik Θ ∗ ) + κsik + ηsign(sik)] + ∑ 2 q = 1 Θ ~ T qΓqΘ ~ q = - s T ik[ρ + κsik + ηsign(sik) - Θ ~ T ξ(xik,x · ik)] + ∑ 2 q = 1 Θ ~ T qΓqΘ ~ q = - s T ikρ - s T ikκsik - s T ikηsign(sik) + ∑ 2 q = 1 [Θ ~ T qΓqΘ ~ q + Θ ~ T q s T ikξ(xik,x · ik)] (18) 将参数自适应律式(13)代入式(18)可得 V · (t) = - s T ikρ - s T ikκsik - s T ikηsign(sik) (19) 考虑 ηq> | ρq | ,将其代入式(19)可得 V · (t) ≤- s T ikκsik < 0 (20) 因此,基于滑模和模糊补偿器的编队控制系统 具有渐近稳定性。 3 仿真结果 根据上文设计的控制器进行仿真实验,验证该 方法的有效性。 采用模糊补偿器和滑模控制器的控 制方法结构图如图 3 所示。 图 3 控制方法结构图 Fig.3 Structure of control scheme 设圆形机器人的半径 r = 0.05 m;选择 15%的参 数波动 Δi = Δk = diag(rand,rand),式中 rand 表示一 个在闭区间[ -0.15,0.15]上均匀分布的随机数;考 虑如下周期性外部扰动 πix =πiy =πiθ = 0.5sin(2πt); πkx =πky =πkθ = 0.2sin(πt)。 设领航者 i = 1,跟随者 k = 2、3。 选取控制器参 数:高斯型隶属函数方差 σn = 2 π/ 8,均值 cn 取 -π/ 2、-π/ 4、0、π/ 4、π/ 2;自适应律参数 Γ1 = Γ2 = 0.000 05;此外 λ= diag(2.3,2),κ = diag(5,15),η = diag (0.5, 0.5)。 仿真实验的给定编队任务,3 个机器人从初始位 置,先完成直线编队,然后保持队形跟踪圆形轨迹。 初始位置设置为 τ1 = [0.5 m 0m π/ 2 rad] T ,τ2 = [0.8 m -0.4m 0 rad] T ,τ3 =[1 m -0.5 m π rad] T 。 领 航者跟踪圆形轨迹的线速度 v d 1 = 0. 5 m / s,角速度 w d 1 = 1 rad / s。 领航者与 2 个跟随者期望距离和相角 分别为 x 12 d =[0.13 m π/ 2rad] T ,x 13 d =[0.26 m π/ 2rad] T 。 编队效果如图 4 所示,图中的实心圆点表示初始位 置,空心圆点表示动态过程中的位置。 图 4 直线编队跟踪圆形轨迹 Fig.4 Line formation while moving in a circle 采用文[12] 中一阶滑模控制方法和二阶滑模 控制方法与本文所提出模糊补偿器与滑模控制器相 结合的控制方法进行对比实验,仿真结果如图 5 ~ 8 所示。 从图 5 看出,在不确定性上界未知的假设条 件下,带模糊补偿器的滑模控制方法可以使 3 个机 器人迅速地收敛到期望队形,并以较高的跟踪精度 保持期望队形运动;滑模控制方法的动态响应时间 较长,且由于不确定性的影响在编队形成后存在明 显波动。 滑模控制的不连续性导致了控制器输出存在抖 振现象,如图 6 和图 7,用饱和函数替换式(12)中的 符号函数可以改善这种现象。 从图 8 看出,当编队 系统进入滑动模态后,由于不确定性的影响会使系 统在滑模面附近产生抖动,但此时 l ik和 ψik已进入平 衡点邻域内,故系统保持局部渐近稳定。 由图 9 可 知,模糊补偿器可以有效地跟踪编队系统的未知的 不确定项。 ·644· 智 能 系 统 学 报 第 11 卷