正在加载图片...
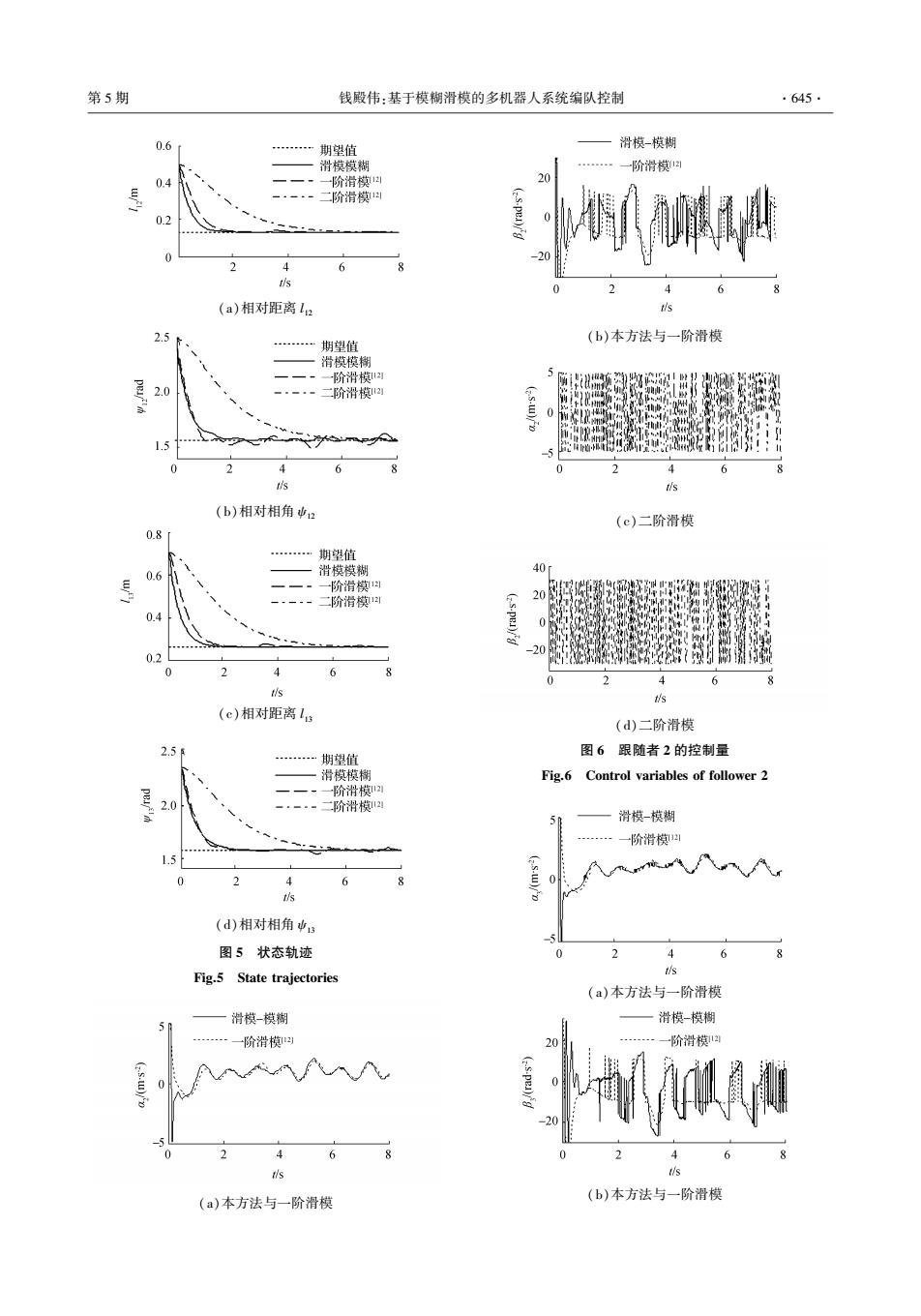
第5期 钱殿伟:基于模糊滑模的多机器人系统编队控制 ·645· 0.6 ”期望值 滑模-模糊 滑模模糊 …一阶滑模以 一阶滑模 二阶滑模叫 0.2 型 20 2 4 (a)相对距离le s 2.5 (b)本方法与一阶滑模 …期望值 滑模模糊 一阶滑模2 pe 2.0 二阶滑模2 GA. 0 1.5 2 4 6 2 tis (b)相对相角中2 (c)二阶滑模 0.8 期望值 0.6 滑模模糊 40 一阶滑模1创 阶滑模 20 0.4 -20 0.2 0 2 4 6 0 2 4 s (c)相对距离s (d)二阶滑模 2.5f 图6跟随者2的控制量 ……期望值 滑模模糊 Fig.6 Control variables of follower 2 一·一阶滑模 2.0 一·一·一二阶滑模2四 滑模模糊 阶滑模以 1.5 0 2 4 6 8 s (d)相对相角中3 图5状态轨迹 Fig.5 State trajectories (a)本方法与一阶滑模 5 滑模-模糊 滑模-模糊 阶滑模四 阶滑模凶 20 s (a)本方法与一阶滑模 (b)本方法与一阶滑模(a)相对距离 l 12 (b)相对相角 ψ12 (c)相对距离 l 13 (d)相对相角 ψ13 图 5 状态轨迹 Fig.5 State trajectories (a)本方法与一阶滑模 (b)本方法与一阶滑模 (c)二阶滑模 (d)二阶滑模 图 6 跟随者 2 的控制量 Fig.6 Control variables of follower 2 (a)本方法与一阶滑模 (b)本方法与一阶滑模 第 5 期 钱殿伟:基于模糊滑模的多机器人系统编队控制 ·645·