正在加载图片...
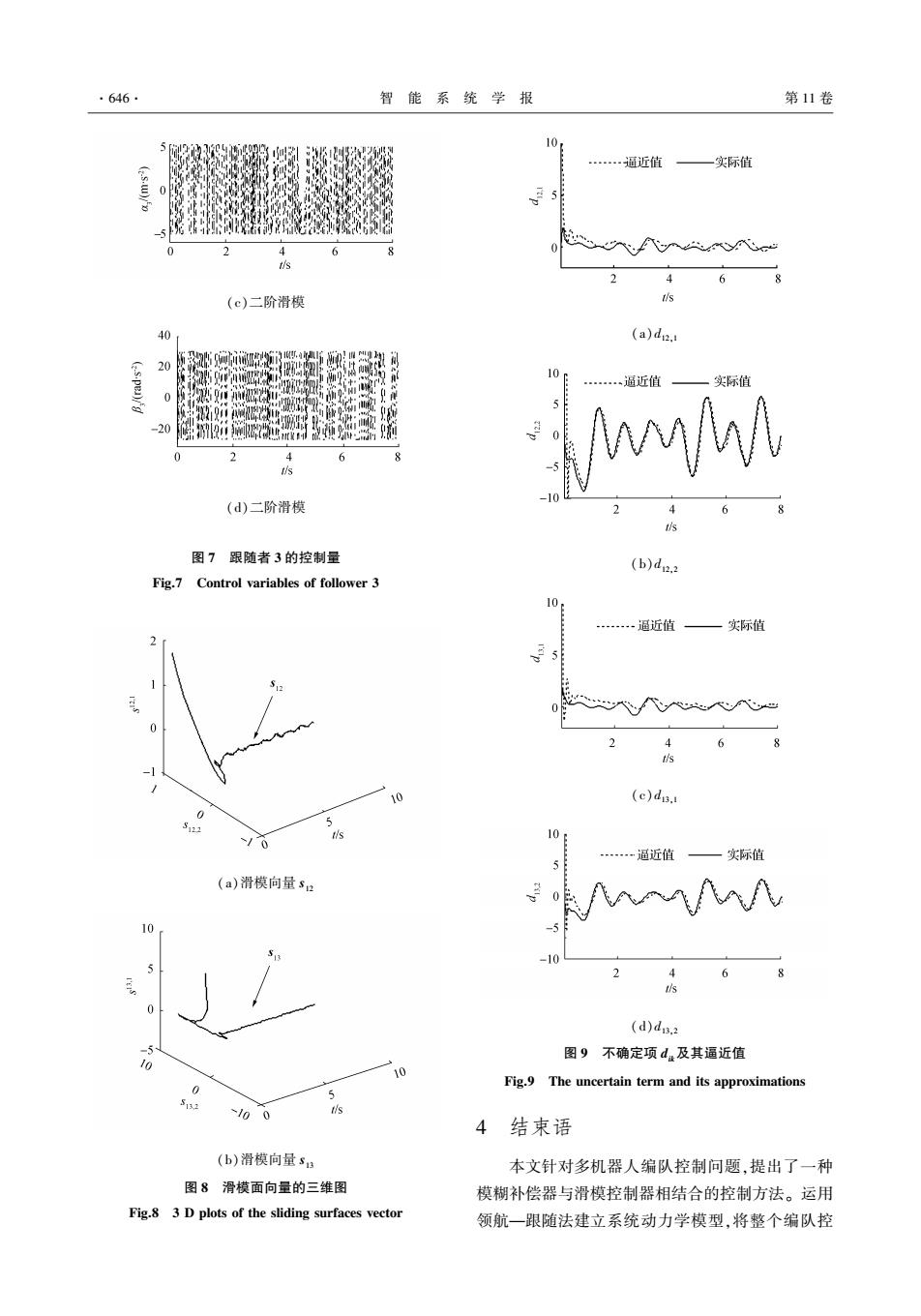
·646. 智能系统学报 第11卷 10 …逼近值 一实际值 5 2 4 4 (c)二阶滑模 s 40 (a)d. 20 (s.pe)/'g -20 2 4 6 s ·nn 通近值 (d)二阶滑模 图7跟随者3的控制量 (b)d22 Fig.7 Control variables of follower 3 10 ……-逼近值 一实际值 5 0 0 2 4 6 10 (c)dn. 5 -10 …一逼近值 一实际值 5 (a)滑模向量s2 (d)d.2 10 图9不确定项d,及其逼近值 Fig.9 The uncertain term and its approximations 5 513 100 s 4 结束语 (b)滑模向量s3 本文针对多机器人编队控制问题,提出了一种 图8滑模面向量的三维图 模糊补偿器与滑模控制器相结合的控制方法。运用 Fig.8 3 D plots of the sliding surfaces vector 领航一跟随法建立系统动力学模型,将整个编队控(c)二阶滑模 (d)二阶滑模 图 7 跟随者 3 的控制量 Fig.7 Control variables of follower 3 (a)滑模向量 s12 (b)滑模向量 s13 图 8 滑模面向量的三维图 Fig.8 3 D plots of the sliding surfaces vector (a)d12,1 (b)d12,2 (c)d13,1 (d)d13,2 图 9 不确定项 dik及其逼近值 Fig.9 The uncertain term and its approximations 4 结束语 本文针对多机器人编队控制问题,提出了一种 模糊补偿器与滑模控制器相结合的控制方法。 运用 领航—跟随法建立系统动力学模型,将整个编队控 ·646· 智 能 系 统 学 报 第 11 卷