正在加载图片...
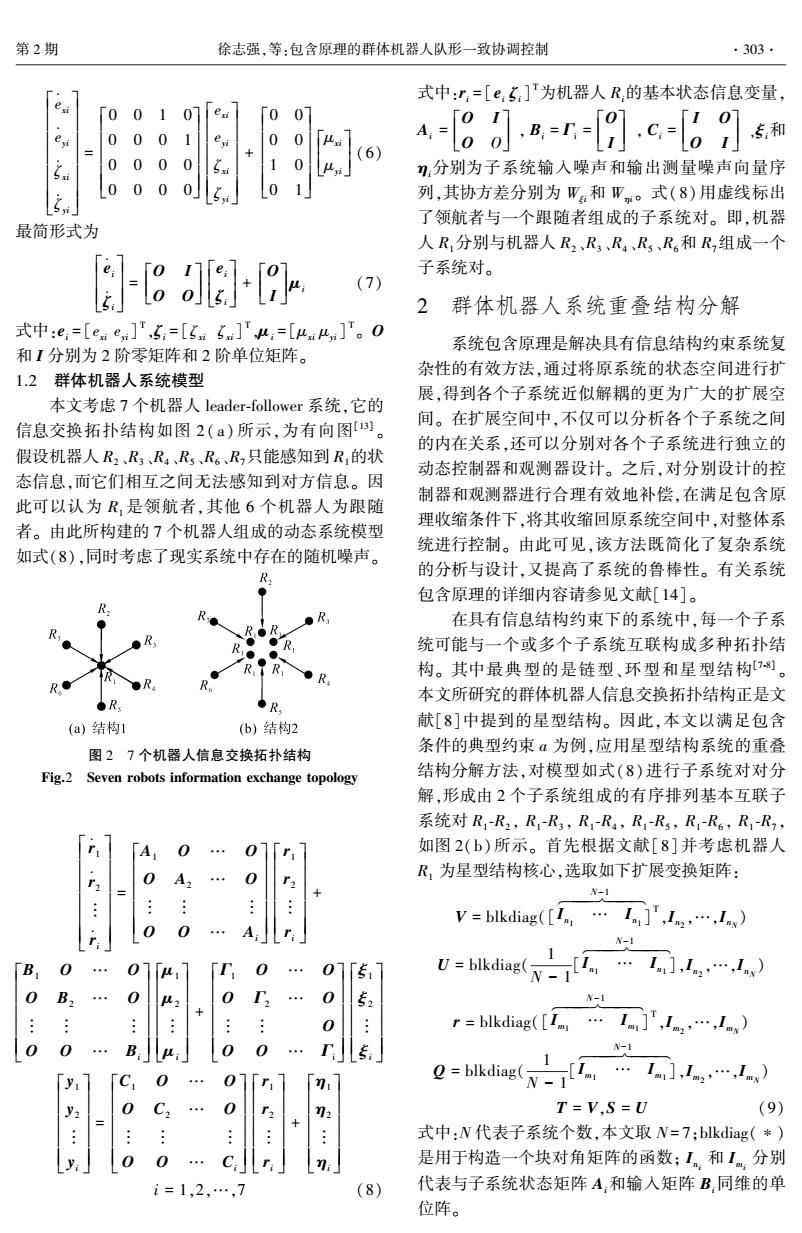
第2期 徐志强,等,包含原理的群体机器人队形一致协调控制 ·303 式中:r:=[e:5:]'为机器人R,的基本状态信息变量, e 0 0 0 0 0 0 en 0 0 ,和 (6) 0 0 0 0 0 η:分别为子系统输入噪声和输出测量噪声向量序 0 0 0 0 1 列,其协方差分别为W和W。式(8)用虚线标出 了领航者与一个跟随者组成的子系统对。即,机器 最简形式为 人R分别与机器人R2、R、R4、R、R,和R,组成一个 子系统对。 2群体机器人系统重叠结构分解 式中:e:=[eae]T,5:=[a5]u:=[ua4]T。0 系统包含原理是解决具有信息结构约束系统复 和I分别为2阶零矩阵和2阶单位矩阵。 杂性的有效方法,通过将原系统的状态空间进行扩 1.2群体机器人系统模型 展,得到各个子系统近似解耦的更为广大的扩展空 本文考虑7个机器人leader--follower系统,它的 信息交换拓扑结构如图2(a)所示,为有向图[)。 间。在扩展空间中,不仅可以分析各个子系统之间 的内在关系,还可以分别对各个子系统进行独立的 假设机器人R2、R,、R4、R5、R。、R,只能感知到R的状 动态控制器和观测器设计。之后,对分别设计的控 态信息,而它们相互之间无法感知到对方信息。因 制器和观测器进行合理有效地补偿,在满足包含原 此可以认为R,是领航者,其他6个机器人为跟随 理收缩条件下,将其收缩回原系统空间中,对整体系 者。由此所构建的7个机器人组成的动态系统模型 统进行控制。由此可见,该方法既简化了复杂系统 如式(8),同时考虑了现实系统中存在的随机噪声。 R 的分析与设计,又提高了系统的鲁棒性。有关系统 包含原理的详细内容请参见文献[14]。 R 在具有信息结构约束下的系统中,每一个子系 统可能与一个或多个子系统互联构成多种拓扑结 R 构。其中最典型的是链型、环型和星型结构。 本文所研究的群体机器人信息交换拓扑结构正是文 R ◆R (a)结构1 (b)结构2 献[8]中提到的星型结构。因此,本文以满足包含 图27个机器人信息交换拓扑结构 条件的典型约束α为例,应用星型结构系统的重叠 Fig.2 Seven robots information exchange topology 结构分解方法,对模型如式(8)进行子系统对对分 解,形成由2个子系统组成的有序排列基本互联子 系统对R1-R2,R1-R3,R1-R4,R1-R5,R1-R6,R1-R A 0 0 如图2(b)所示。首先根据文献[8]并考虑机器人 0 A 0 R,为星型结构核心,选取如下扩展变换矩阵: N-1 . .· : V=blkdiag([Ln,… 1n],l,…,1v) 0 0 A N-1 B. 0 0 0 U=blkdiag( -1 B, 2 T 0 52 N-I .· .. 0 r=blkdiag([1…]',l…,1n) 0 B 0 0 N-1 y C 0 n Q=blkdiag(N-1 1n,…1m],,…,1) 0 C, T=V,S=U (9) .: 式中:代表子系统个数,本文取N=7:blkdiag(*) y 0 0 是用于构造一个块对角矩阵的函数;I和I分别 i= 1,2,…,7 8 代表与子系统状态矩阵A和输入矩阵B,同维的单 位阵。e · xi e · yi ζ · xi ζ · yi é ë ê ê ê ê ê ê ê ù û ú ú ú ú ú ú ú = 0 0 1 0 0 0 0 1 0 0 0 0 0 0 0 0 é ë ê ê ê ê ê ù û ú ú ú ú ú exi eyi ζxi ζyi é ë ê ê ê ê êê ù û ú ú ú ú úú + 0 0 0 0 1 0 0 1 é ë ê ê ê ê ê ù û ú ú ú ú ú μxi μyi é ë ê ê ù û ú ú (6) 最简形式为 e · i ζ · i é ë ê ê ê ù û ú ú ú = O I O O é ë ê ê ù û ú ú ei ζi é ë ê ê ù û ú ú + O I é ë ê ê ù û ú ú μi (7) 式中:ei = [exi eyi] T ,ζi = [ζxi ζxi] T ,μi = [μxi μyi] T 。 O 和 I 分别为 2 阶零矩阵和 2 阶单位矩阵。 1.2 群体机器人系统模型 本文考虑 7 个机器人 leader⁃follower 系统,它的 信息交换拓扑结构如图 2( a) 所示,为有向图[13] 。 假设机器人 R2 、R3 、R4 、R5 、R6 、R7只能感知到 R1的状 态信息,而它们相互之间无法感知到对方信息。 因 此可以认为 R1 是领航者,其他 6 个机器人为跟随 者。 由此所构建的 7 个机器人组成的动态系统模型 如式(8),同时考虑了现实系统中存在的随机噪声。 图 2 7 个机器人信息交换拓扑结构 Fig.2 Seven robots information exchange topology r · 1 r · 2 ︙ r · i é ë ê ê ê ê ê ê ù û ú ú ú ú ú ú = A1 O … O O A2 … O ︙ ︙ ︙ O O … Ai é ë ê ê ê ê ê ù û ú ú ú ú ú r1 r2 ︙ ri é ë ê ê ê ê ê ù û ú ú ú ú ú + B1 O … O O B2 … O ︙ ︙ ︙ O O … Bi é ë ê ê ê ê ê ù û ú ú ú ú ú μ1 μ2 ︙ μi é ë ê ê ê ê ê ù û ú ú ú ú ú + Γ1 O … O O Γ2 … O ︙ ︙ O O O … Γi é ë ê ê ê ê ê ù û ú ú ú ú ú ξ1 ξ2 ︙ ξi é ë ê ê ê ê ê ù û ú ú ú ú ú y1 y2 ︙ yi é ë ê ê ê ê ê ù û ú ú ú ú ú = C1 O … O O C2 … O ︙ ︙ ︙ O O … Ci é ë ê ê ê ê ê ù û ú ú ú ú ú r1 r2 ︙ ri é ë ê ê ê ê ê ù û ú ú ú ú ú + η1 η2 ︙ ηi é ë ê ê ê ê ê ù û ú ú ú ú ú i = 1,2,…,7 (8) 式中:ri = [ei ζi] T为机器人 Ri的基本状态信息变量, Ai = O I O O é ë ê ê ù û ú ú , Bi = Γi = O I é ë ê ê ù û ú ú , Ci = I O O I é ë ê ê ù û ú ú ,ξi和 ηi分别为子系统输入噪声和输出测量噪声向量序 列,其协方差分别为 Wξi和 Wηi。 式(8)用虚线标出 了领航者与一个跟随者组成的子系统对。 即,机器 人 R1分别与机器人 R2 、R3 、R4 、R5 、R6和 R7组成一个 子系统对。 2 群体机器人系统重叠结构分解 系统包含原理是解决具有信息结构约束系统复 杂性的有效方法,通过将原系统的状态空间进行扩 展,得到各个子系统近似解耦的更为广大的扩展空 间。 在扩展空间中,不仅可以分析各个子系统之间 的内在关系,还可以分别对各个子系统进行独立的 动态控制器和观测器设计。 之后,对分别设计的控 制器和观测器进行合理有效地补偿,在满足包含原 理收缩条件下,将其收缩回原系统空间中,对整体系 统进行控制。 由此可见,该方法既简化了复杂系统 的分析与设计,又提高了系统的鲁棒性。 有关系统 包含原理的详细内容请参见文献[14]。 在具有信息结构约束下的系统中,每一个子系 统可能与一个或多个子系统互联构成多种拓扑结 构。 其中最典型的是链型、环型和星型结构[7⁃8] 。 本文所研究的群体机器人信息交换拓扑结构正是文 献[8]中提到的星型结构。 因此,本文以满足包含 条件的典型约束 a 为例,应用星型结构系统的重叠 结构分解方法,对模型如式(8)进行子系统对对分 解,形成由 2 个子系统组成的有序排列基本互联子 系统对 R1 ⁃R2 , R1 ⁃R3 , R1 ⁃R4 , R1 ⁃R5 , R1 ⁃R6 , R1 ⁃R7 , 如图 2( b)所示。 首先根据文献[8] 并考虑机器人 R1 为星型结构核心,选取如下扩展变换矩阵: V = blkdiag([In1 … In1 î ï Ní-1ï ï ì ] T ,In2 ,…,InN ) U = blkdiag( 1 N - 1 [In1 … In1 î ï Ní-1ï ï ì ],In2 ,…,InN ) r = blkdiag([Im1 … Im1 î ï Ní-1ï ï ì ] T ,Im2 ,…,ImN ) Q = blkdiag( 1 N - 1 [Im1 … Im1 î ï Ní-1ï ï ì ],Im2 ,…,ImN ) T = V,S = U (9) 式中:N 代表子系统个数,本文取 N= 7;blkdiag(∗) 是用于构造一个块对角矩阵的函数; Ini 和 Imi 分别 代表与子系统状态矩阵 Ai和输入矩阵 Bi同维的单 位阵。 第 2 期 徐志强,等:包含原理的群体机器人队形一致协调控制 ·303·