正在加载图片...
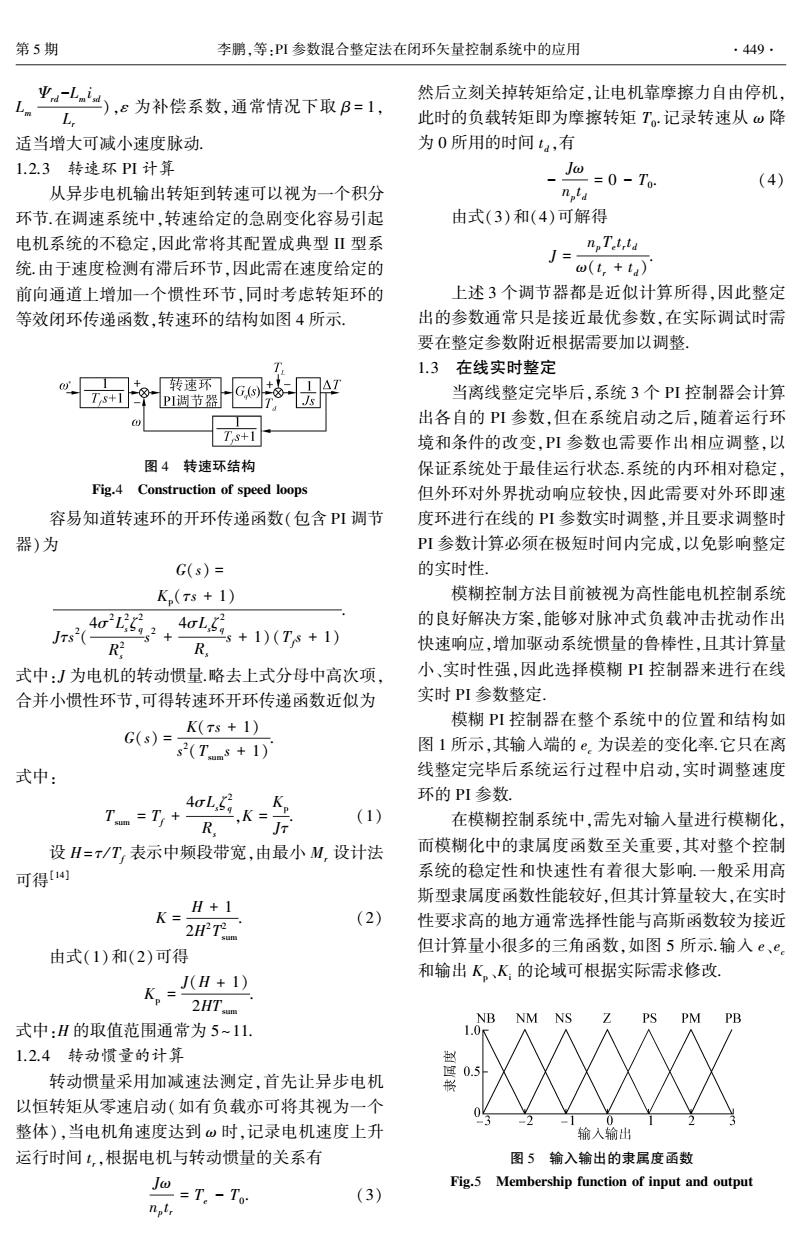
第5期 李鹏,等:PI参数混合整定法在闭环矢量控制系统中的应用 449· Y。-L),s为补偿系数,通常情况下取B=1, 然后立刻关掉转矩给定,让电机靠摩擦力自由停机, L L 此时的负载转矩即为摩擦转矩T。·记录转速从ω降 适当增大可减小速度脉动. 为0所用的时间ta,有 1.2.3转速环PI计算 、 =0-T (4) 从异步电机输出转矩到转速可以视为一个积分 nta 环节.在调速系统中,转速给定的急剧变化容易引起 由式(3)和(4)可解得 电机系统的不稳定,因此常将其配置成典型Ⅱ型系 J=nTtta 统由于速度检测有滞后环节,因此需在速度给定的 (t,+ta) 前向通道上增加一个惯性环节,同时考虑转矩环的 上述3个调节器都是近似计算所得,因此整定 等效闭环传递函数,转速环的结构如图4所示 出的参数通常只是接近最优参数,在实际调试时需 要在整定参数附近根据需要加以调整。 1.3在线实时整定 转速环 1△7 s+ PI调节器 当离线整定完毕后,系统3个PI控制器会计算 出各自的PI参数,但在系统启动之后,随着运行环 T3+1 境和条件的改变,PI参数也需要作出相应调整,以 图4转速环结构 保证系统处于最佳运行状态.系统的内环相对稳定, Fig.4 Construction of speed loops 但外环对外界扰动响应较快,因此需要对外环即速 容易知道转速环的开环传递函数(包含PI调节 度环进行在线的PI参数实时调整,并且要求调整时 器)为 PI参数计算必须在极短时间内完成,以免影响整定 G(s)= 的实时性 K(Ts +1) 模糊控制方法目前被视为高性能电机控制系统 +oL≤+1)T+) 的良好解决方案,能够对脉冲式负载冲击扰动作出 JTs(- R2 R. 快速响应,增加驱动系统惯量的鲁棒性,且其计算量 式中:J为电机的转动惯量.略去上式分母中高次项, 小、实时性强,因此选择模糊PI控制器来进行在线 合并小惯性环节,可得转速环开环传递函数近似为 实时PI参数整定. K(Ts+1) 模糊PI控制器在整个系统中的位置和结构如 G(s)= s2(Tms 1) 图1所示,其输入端的e.为误差的变化率.它只在离 式中: 线整定完毕后系统运行过程中启动,实时调整速度 环的PI参数. T.m=T+R. (1) 在模糊控制系统中,需先对输入量进行模糊化, 设H=r/T,表示中频段带宽,由最小M,设计法 而模糊化中的隶属度函数至关重要,其对整个控制 可得4 系统的稳定性和快速性有着很大影响.一般采用高 斯型隶属度函数性能较好,但其计算量较大,在实时 H+1 K= 2 2HTm 性要求高的地方通常选择性能与高斯函数较为接近 由式(1)和(2)可得 但计算量小很多的三角函数,如图5所示.输入e、e. J(H+1) 和输出K。、K,的论域可根据实际需求修改。 K=2HT.m NM NS PM PB 式中:H的取值范围通常为5~11 1.2.4转动惯量的计算 0.5 转动惯量采用加减速法测定,首先让异步电机 以恒转矩从零速启动(如有负载亦可将其视为一个 整体),当电机角速度达到ω时,记录电机速度上升 输入输出 运行时间(,根据电机与转动惯量的关系有 图5输入输出的隶属度函数 Fig.5 Membership function of input and output =T。-To (3) nt,Lm Ψrd -Lm i sd Lr )ꎬε 为补偿系数ꎬ通常情况下取 β = 1ꎬ 适当增大可减小速度脉动. 1.2.3 转速环 PI 计算 从异步电机输出转矩到转速可以视为一个积分 环节.在调速系统中ꎬ转速给定的急剧变化容易引起 电机系统的不稳定ꎬ因此常将其配置成典型 II 型系 统.由于速度检测有滞后环节ꎬ因此需在速度给定的 前向通道上增加一个惯性环节ꎬ同时考虑转矩环的 等效闭环传递函数ꎬ转速环的结构如图 4 所示. 图 4 转速环结构 Fig.4 Construction of speed loops 容易知道转速环的开环传递函数(包含 PI 调节 器)为 G(s) = Kp(τs + 1) Jτs 2 ( 4σ 2 L 2 s ζ 2 q R 2 s s 2 + 4σLs ζ 2 q Rs s + 1)(Tf s + 1) . 式中:J 为电机的转动惯量.略去上式分母中高次项ꎬ 合并小惯性环节ꎬ可得转速环开环传递函数近似为 G(s) = K(τs + 1) s 2 (Tsum s + 1) . 式中: Tsum = Tf + 4σLs ζ 2 q Rs ꎬK = Kp Jτ . (1) 设 H= τ / Tf 表示中频段带宽ꎬ由最小 Mr 设计法 可得[14] K = H + 1 2H 2 T 2 sum . (2) 由式(1)和(2)可得 Kp = J(H + 1) 2HTsum . 式中:H 的取值范围通常为 5~11. 1.2.4 转动惯量的计算 转动惯量采用加减速法测定ꎬ首先让异步电机 以恒转矩从零速启动(如有负载亦可将其视为一个 整体)ꎬ当电机角速度达到 ω 时ꎬ记录电机速度上升 运行时间 t rꎬ根据电机与转动惯量的关系有 Jω np t r = Te - T0 . (3) 然后立刻关掉转矩给定ꎬ让电机靠摩擦力自由停机ꎬ 此时的负载转矩即为摩擦转矩 T0 .记录转速从 ω 降 为 0 所用的时间 t d ꎬ有 - Jω np t d = 0 - T0 . (4) 由式(3)和(4)可解得 J = npTe t r t d ω(t r + t d ) . 上述 3 个调节器都是近似计算所得ꎬ因此整定 出的参数通常只是接近最优参数ꎬ在实际调试时需 要在整定参数附近根据需要加以调整. 1.3 在线实时整定 当离线整定完毕后ꎬ系统 3 个 PI 控制器会计算 出各自的 PI 参数ꎬ但在系统启动之后ꎬ随着运行环 境和条件的改变ꎬPI 参数也需要作出相应调整ꎬ以 保证系统处于最佳运行状态.系统的内环相对稳定ꎬ 但外环对外界扰动响应较快ꎬ因此需要对外环即速 度环进行在线的 PI 参数实时调整ꎬ并且要求调整时 PI 参数计算必须在极短时间内完成ꎬ以免影响整定 的实时性. 模糊控制方法目前被视为高性能电机控制系统 的良好解决方案ꎬ能够对脉冲式负载冲击扰动作出 快速响应ꎬ增加驱动系统惯量的鲁棒性ꎬ且其计算量 小、实时性强ꎬ因此选择模糊 PI 控制器来进行在线 实时 PI 参数整定. 模糊 PI 控制器在整个系统中的位置和结构如 图 1 所示ꎬ其输入端的 ec 为误差的变化率.它只在离 线整定完毕后系统运行过程中启动ꎬ实时调整速度 环的 PI 参数. 在模糊控制系统中ꎬ需先对输入量进行模糊化ꎬ 而模糊化中的隶属度函数至关重要ꎬ其对整个控制 系统的稳定性和快速性有着很大影响.一般采用高 斯型隶属度函数性能较好ꎬ但其计算量较大ꎬ在实时 性要求高的地方通常选择性能与高斯函数较为接近 但计算量小很多的三角函数ꎬ如图 5 所示.输入 e、ec 和输出 Kp 、Ki 的论域可根据实际需求修改. 图 5 输入输出的隶属度函数 Fig.5 Membership function of input and output 第 5 期 李鹏ꎬ等:PI 参数混合整定法在闭环矢量控制系统中的应用 449