正在加载图片...
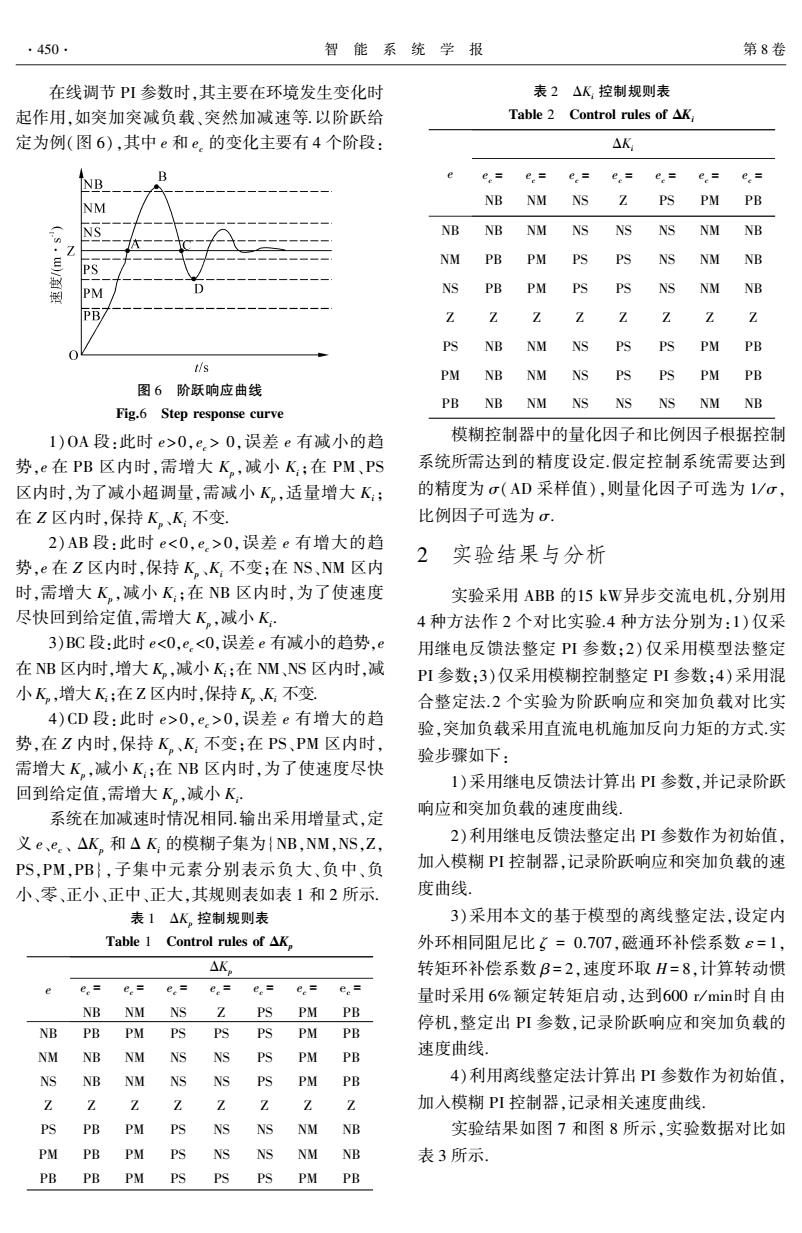
·450· 智能系统学报 第8卷 在线调节PI参数时,其主要在环境发生变化时 表2△K控制规则表 起作用,如突加突减负载、突然加减速等以阶跃给 Table 2 Control rules of AK, 定为例(图6),其中e和e.的变化主要有4个阶段: △K NB e e.= e= e。=e,=e.= e= NM NB NM NS 2 PS PM PB NS NB NB NM NS NS NS NM NB NM PB PM PS PS NS NM NB PS PM D NS PB PM Ns NM NB PBA Z Z Z Z Z Z PS NB PS PS PM PB t/s PM NB NM NS PS PS PM PB 图6阶跃响应曲线 PB NB NM NS NS NS NM NB Fig.6 Step response curve 1)0A段:此时e>0,e,>0,误差e有减小的趋 模糊控制器中的量化因子和比例因子根据控制 势,e在PB区内时,需增大K,减小K;在PM、PS 系统所需达到的精度设定假定控制系统需要达到 区内时,为了减小超调量,需减小K,适量增大K: 的精度为σ(AD采样值),则量化因子可选为1/σ, 在Z区内时,保持K。K不变 比例因子可选为σ 2)AB段:此时e<0,e.>0,误差e有增大的趋 2实验结果与分析 势,e在Z区内时,保持K。、K,不变;在NS、NM区内 时,需增大K,减小K;在NB区内时,为了使速度 实验采用ABB的15kW异步交流电机,分别用 尽快回到给定值,需增大K,减小K 4种方法作2个对比实验.4种方法分别为:1)仅采 3)BC段:此时e<0,e.<0,误差e有减小的趋势,e 用继电反馈法整定PI参数:2)仅采用模型法整定 在NB区内时,增大K,减小K:在NM、NS区内时,减 PI参数:3)仅采用模糊控制整定PI参数:4)采用混 小K,增大K:在Z区内时,保持K,K不变 合整定法.2个实验为阶跃响应和突加负载对比实 4)CD段:此时e>0,e.>0,误差e有增大的趋 验,突加负载采用直流电机施加反向力矩的方式实 势,在Z内时,保持K。、K,不变;在PS、PM区内时, 验步骤如下: 需增大K。,减小K;在NB区内时,为了使速度尽快 1)采用继电反馈法计算出PI参数,并记录阶跃 回到给定值,需增大K。,减小K 系统在加减速时情况相同.输出采用增量式,定 响应和突加负载的速度曲线. 义e、e、△K,和△K的模糊子集为{NB,NM,NS,Z, 2)利用继电反馈法整定出PI参数作为初始值, PS,PM,PB},子集中元素分别表示负大、负中、负 加入模糊PI控制器,记录阶跃响应和突加负载的速 小、零、正小、正中、正大,其规则表如表1和2所示. 度曲线 表1△K,控制规则表 3)采用本文的基于模型的离线整定法,设定内 Table 1 Control rules of AK, 外环相同阻尼比(=0.707,磁通环补偿系数ε=1, △K 转矩环补偿系数B=2,速度环取H=8,计算转动惯 e。 e.=e= e.=e,=e=e.= 量时采用6%额定转矩启动,达到600r/min时自由 NB NM NS Z PS PM PB nB PB PM PSPS PS PM PB 停机,整定出PI参数,记录阶跃响应和突加负载的 NM NB NM NS NS PS PM PB 速度曲线。 NS NB NM NS NS PS PM PB 4)利用离线整定法计算出PI参数作为初始值, Z Z 1 加入模糊PI控制器,记录相关速度曲线。 PS PB PM PS NS NS NM NB 实验结果如图7和图8所示,实验数据对比如 PM PB PM PS NS NS NM NB 表3所示. PBPB PM PS PSPS PM PB在线调节 PI 参数时ꎬ其主要在环境发生变化时 起作用ꎬ如突加突减负载、突然加减速等.以阶跃给 定为例(图 6)ꎬ其中 e 和 ec 的变化主要有 4 个阶段: 图 6 阶跃响应曲线 Fig.6 Step response curve 1)OA 段:此时 e>0ꎬec > 0ꎬ误差 e 有减小的趋 势ꎬe 在 PB 区内时ꎬ需增大 Kpꎬ减小 Kiꎻ在 PM、PS 区内时ꎬ为了减小超调量ꎬ需减小 Kpꎬ适量增大 Kiꎻ 在 Z 区内时ꎬ保持 Kp、Ki 不变. 2)AB 段:此时 e< 0ꎬec > 0ꎬ误差 e 有增大的趋 势ꎬe 在 Z 区内时ꎬ保持 Kp、Ki 不变ꎻ在 NS、NM 区内 时ꎬ需增大 Kpꎬ减小 Kiꎻ在 NB 区内时ꎬ为了使速度 尽快回到给定值ꎬ需增大 Kpꎬ减小 Ki . 3)BC 段:此时 e<0ꎬec <0ꎬ误差 e 有减小的趋势ꎬe 在 NB 区内时ꎬ增大 Kpꎬ减小 Kiꎻ在 NM、NS 区内时ꎬ减 小 Kpꎬ增大 Kiꎻ在 Z 区内时ꎬ保持 Kp、Ki 不变. 4)CD 段:此时 e> 0ꎬec > 0ꎬ误差 e 有增大的趋 势ꎬ在 Z 内时ꎬ保持 Kp、Ki 不变ꎻ在 PS、PM 区内时ꎬ 需增大 Kpꎬ减小 Kiꎻ在 NB 区内时ꎬ为了使速度尽快 回到给定值ꎬ需增大 Kpꎬ减小 Ki . 系统在加减速时情况相同.输出采用增量式ꎬ定 义 e、ec、 ΔKp 和 Δ Ki 的模糊子集为{NBꎬNMꎬNSꎬZꎬ PSꎬPMꎬPB}ꎬ子集中元素分别表示负大、负中、负 小、零、正小、正中、正大ꎬ其规则表如表 1 和 2 所示. 表 1 ΔKp 控制规则表 Table 1 Control rules of ΔKp e ΔKp ec = NB ec = NM ec = NS ec = Z ec = PS ec = PM ec = PB NB PB PM PS PS PS PM PB NM NB NM NS NS PS PM PB NS NB NM NS NS PS PM PB Z Z Z Z Z Z Z Z PS PB PM PS NS NS NM NB PM PB PM PS NS NS NM NB PB PB PM PS PS PS PM PB 表 2 ΔKi 控制规则表 Table 2 Control rules of ΔKi e ΔKi ec = NB ec = NM ec = NS ec = Z ec = PS ec = PM ec = PB NB NB NM NS NS NS NM NB NM PB PM PS PS NS NM NB NS PB PM PS PS NS NM NB Z Z Z Z Z Z Z Z PS NB NM NS PS PS PM PB PM NB NM NS PS PS PM PB PB NB NM NS NS NS NM NB 模糊控制器中的量化因子和比例因子根据控制 系统所需达到的精度设定.假定控制系统需要达到 的精度为 σ(AD 采样值)ꎬ则量化因子可选为 1 / σꎬ 比例因子可选为 σ. 2 实验结果与分析 实验采用 ABB 的15 kW异步交流电机ꎬ分别用 4 种方法作 2 个对比实验.4 种方法分别为:1)仅采 用继电反馈法整定 PI 参数ꎻ2) 仅采用模型法整定 PI 参数ꎻ3)仅采用模糊控制整定 PI 参数ꎻ4)采用混 合整定法.2 个实验为阶跃响应和突加负载对比实 验ꎬ突加负载采用直流电机施加反向力矩的方式.实 验步骤如下: 1)采用继电反馈法计算出 PI 参数ꎬ并记录阶跃 响应和突加负载的速度曲线. 2)利用继电反馈法整定出 PI 参数作为初始值ꎬ 加入模糊 PI 控制器ꎬ记录阶跃响应和突加负载的速 度曲线. 3)采用本文的基于模型的离线整定法ꎬ设定内 外环相同阻尼比 ζ = 0.707ꎬ磁通环补偿系数 ε = 1ꎬ 转矩环补偿系数 β = 2ꎬ速度环取 H = 8ꎬ计算转动惯 量时采用 6%额定转矩启动ꎬ达到600 r/ min时自由 停机ꎬ整定出 PI 参数ꎬ记录阶跃响应和突加负载的 速度曲线. 4)利用离线整定法计算出 PI 参数作为初始值ꎬ 加入模糊 PI 控制器ꎬ记录相关速度曲线. 实验结果如图 7 和图 8 所示ꎬ实验数据对比如 表 3 所示. 450 智 能 系 统 学 报 第 8 卷